DREAMR: Drilling Rig for the Exploration and Acquisition of Martian Resources
Overview
The NASA RASC-AL Special Edition: Moon to Mars Ice & Prospecting Challenge gives ten universities in the United States the opportunity to participate in a competition focused on designing a system capable of extracting water on the Moon and Mars. This year’s team chose to name themselves Team DREAMR and refer to their system as the Drilling Rig for the Exploration and Acquisition of Martian Resources. For the fourth consecutive year, the Colorado School of Mines was selected as a finalist for the competition set to take place in early June at the NASA Langley Research Center in Hampton, VA. Each of the ten teams received a $10,000 stipend to build their proposed system, travel to the facility, and to transport their system to the event to present their design to a panel of judges and to partake in the competition aspect of the challenge. Each university team will test their system on a simulated lunar and Martian testbed containing layers of overburden that sit atop a solid block of ice. Each team is responsible for reaching the layer of ice, melting, extracting, and filtering any resultant fluid while also being responsible for having a digital core that is able to autonomously respond and identify the different layers in the testbed based on variations in hardness. Teams are then scored based on total water extracted and collected each day, the accuracy of the digital core, adherence to NASA requirements, a technical paper capturing paths-to-flight, innovations and design, and the technical poster presentation.
The individual components that made up the entire system design were chosen with the goal in mind of the team being able to produce as much water as possible but also have an extremely effective digital core as these two factors are the two largest individual variables that make up the total score each team will receive. Each member of the Colorado School of Mines’ team is pursuing an Undergraduate degree in Mechanical Engineering but individually have unique experiences and expertise that allowed each member to be responsible for a subsystem that aligns with their skillset. The team also has three advisors to help assist the team with the development of their system and to participate in the competition. Dr. Angel Abbud-Madrid serves as the team’s advisor and he has more than 30 years of experience conducting experiments at NASA’s low-gravity facilities and has risen to the Director of Space Resources at Mines. He has also been the advisor for each of the previous teams of Mines students that attend the competition. Mark Florida is the team’s project advisor and he has decades of experience in the oil and gas industry working with drilling system design under highly qualified positions such as senior project engineer and manager. To help the team with other needs, Deep Joshi, who partook in the competition last year, is a Ph.D. student in the petroleum engineering department and his research focuses on lunar drilling and material characterization.

Team Members
- Tyler Baack
- Sean Cummins
- Joel Gomez
- Alison Kakos
- Matthew Krist
- Joseph Kusbel
- Sahro Seong
The Client
- Dr. Angel Abbud-Madrid/Director of the Center for Space Resources at CSM
Acknowledgements
Project Advisor: Mr. Mark Florida
Technical Advisor: Dr. Angel Abbud-Madrid
Donations: Mr. Matthew Cail (OEM Business Development Specialist)
Video


Elevator Pitch
NASA’s RASC-AL (Revolutionary Aerospace Systems Concepts Academic Linkage) Special Edition presents their 4th annual Moon to Mars Ice & Prospecting challenge this year. In 2019, Mines participated in the competition with their F.I.R.E. Drill and placed first in most water extracted in one day. Selected as one of the ten teams qualified for competition, Mines presents team DREAMR: Drilling Rig for the Extraction and Acquisition of Martian Resources.
This year’s design features a rotary percussive drill that includes an interchangeable casing sleeve with variable speed and direction control along with a new heating and extraction design, which incorporates water recirculation with a heat exchanger to maximize the effectiveness of the heating subsystem. In addition, the system will include a sophisticated extraction design with a variety of sensors to ensure autonomous extraction of water and a robust digital core. The system will be controlled by an industrial grade programmable logic controller (PLC) for ease of hardware integration and automation. The team is confident it can provide an autonomous drill that supports the prospecting and extraction of resources in a variety of deep space environments.
Design Approach
The key factor in how this challenge was approached was the scoring criteria given by NASA. The most critical components to a high score were based on the extraction and digital core subsystems. The volume of water extracted has the highest potential for point earning followed by correctly identifying the number of overburden layers drilled through and their relative hardness and thickness. Additionally, conducting these operations using a “hands-off” approach allows for up to five times the amount of points to be earned for certain aspects.
With these scoring parameters in mind, and an inherited semi-finished system from the previous year’s team, the team set out to design a system capable of extracting water with great efficiency as well as produce a digital core with clear and reliable data. In order to meet these goals, all subsystems had to be integrated and tested extensively to ensure they functioned as expected and produced repeatable and predictable results.
Initially, the rig inherited from the previous year’s team was found to have several issues. After investigation into the weight, efficiency, and general performance of all subsystems, it was found that the digital core was missing components critical to gathering useful data, the electronics were poorly organized, the control system was not conducive to in-depth testing, and the heating system was built using inadequate materials for high temperatures needed. Though the inherited rig failed in many aspects, the previous year’s team conceptualized very impressive ideas. Building upon these concepts and contributing our own teams ideas, our team was able to produce subsystems with extensive designing and testing to reach the goals we set out to accomplish.
The torque sensor had not been integrated into the rig, and the heating element of the rig had melted some water tubing. Several small, non-vital improvements were made to each subsystem as well as necessary changes, such as the ability to control the entire system using a programmable logic controller instead of LabVIEW. These decisions were made to increase the usability, efficiency, and effectiveness of the system.
Design Solution
Structural
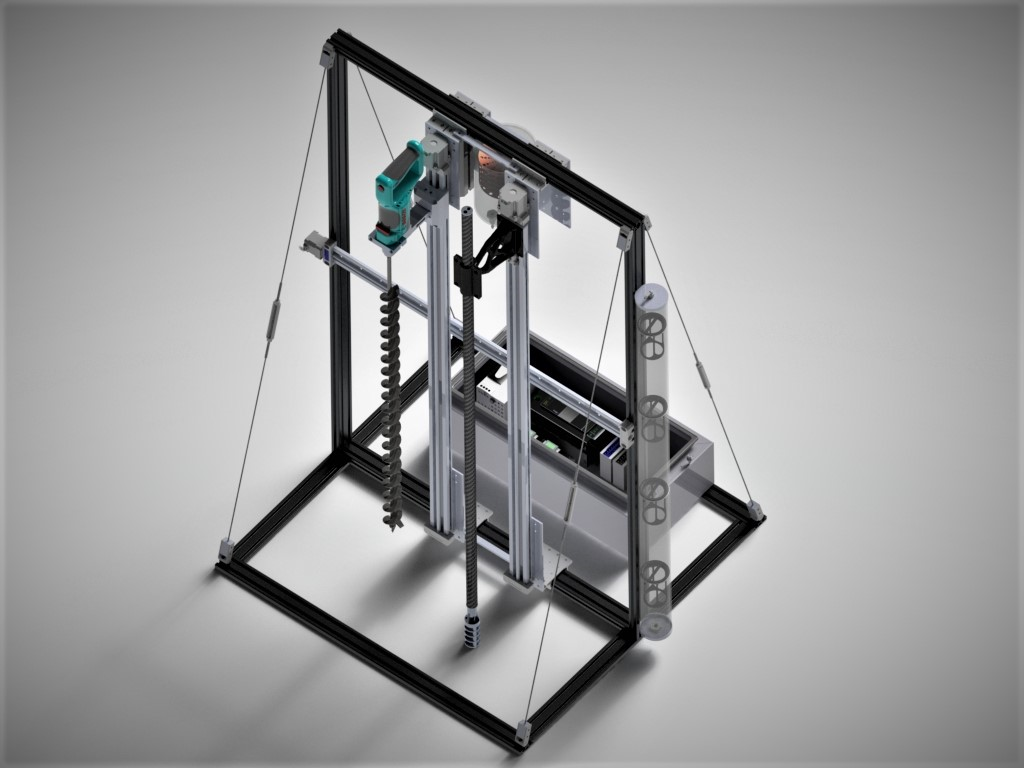
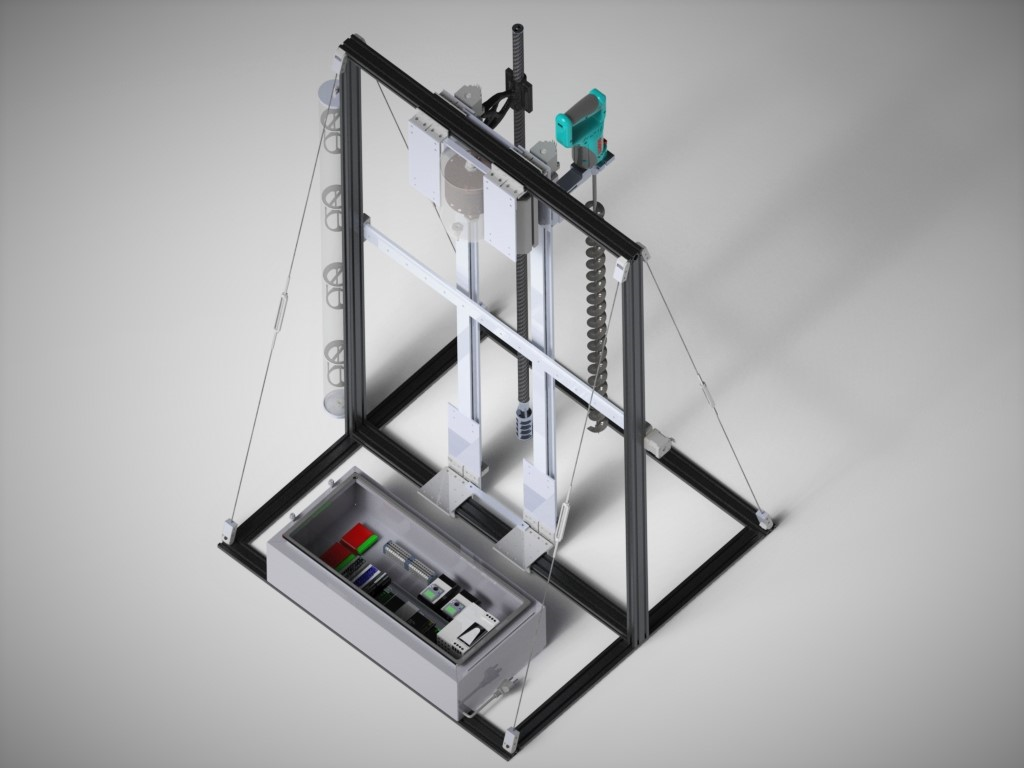
With strict restraints to the size and weight of the system in mind, the structural frame of the system needed to be as light as possible while also not compromising stability of the system while it is in use. Previous teams from Mines have based their design from a gantry crane which allows the drilling and extraction operations of the system to access the entire available testbed. This year’s team will continue the use of this design as it has proven to be successful for previous teams in the past, and will be composed of 80/20 T-slot extruded aluminum.
Heating
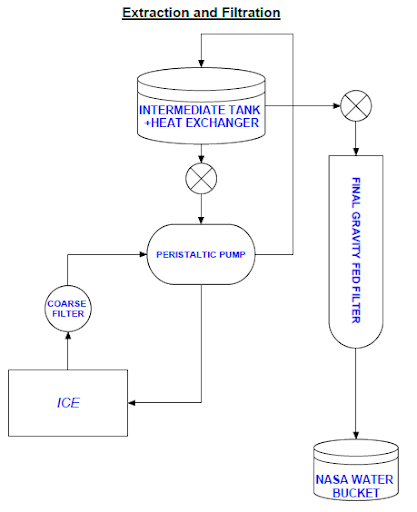
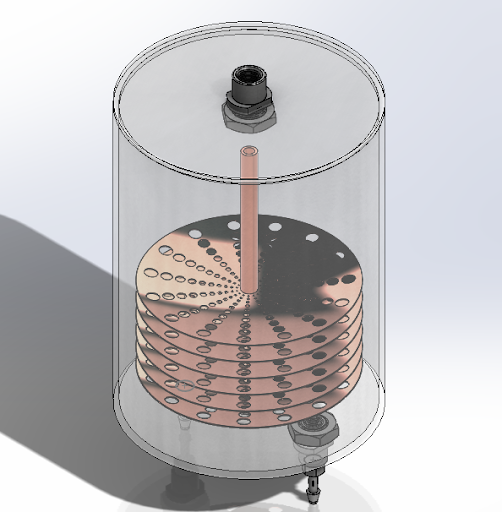
In order to make the water extraction process more efficient, a new system was designed that recirculated the extracted water through a heat exchanger to improve heat transfer and increase our ice melting range radially. The implementation of extracted water recirculation created a forced convection on to the heat probe resulting in a higher rate of heat transfer between the ice, cold water and the heat probe.
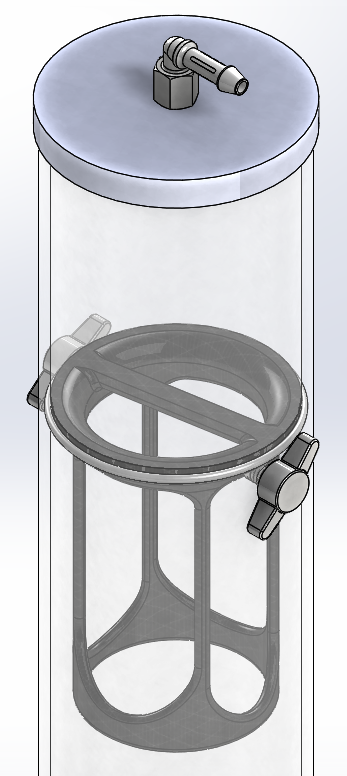
Additionally, the design includes a secondary tank where the initially extracted water will be stored and heated with a secondary heating probe. Once water has accumulated and heated, a valve leading back to the ice rodwell will open to begin recirculating. At this point, the heat probe at the ice interface is powered down and more power is supplied to the intermediate tank. The heating cartridges at the heat probe were replaced with lower power cartridges, to reduce excess power usage.
Programming
Several large improvements were made to the programming subsystem of the rig, the most notable being a switch from the LabVIEW interface of the previous team to a PLC-based setup that would allow the team to control all aspects of the rig remotely, including automation. The PLC runs off of the rig’s 24VDC system. To control the drill, Structured Text was used to modify the frequency of the load cell if WOB reached its competition-defined maximum of 150 N.
Extraction
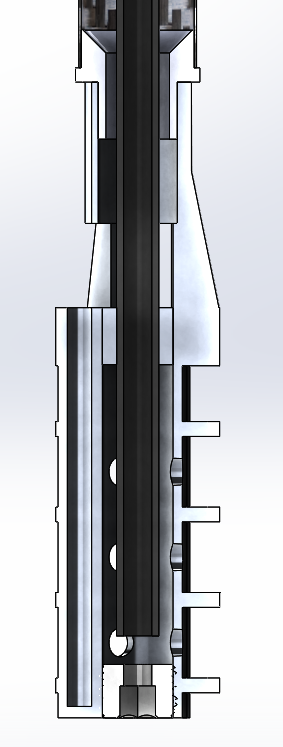
The interface components among the entirety of the extraction subsystem were greatly improved. Connectors at the heat probe and the tube interface in addition to the superior part of the tube were accommodated to allow for water to circulate down to the probe and also allow a tube to reach the lowest point of our heat probe in order to extract the most water. These connectors were designed and made in house to meet the design requirements.
With the implementation of the intermediate tank, the team anticipated design improvements to decrease weight. One of the areas where we saved weight was on the bracket holding the tube with the heat probe and all the tubing needed to extract the water. For this bracket we implemented a unique approach in order to maximize the weight to stiffness ratio, by performing a topology study. In the simulation we calculated the maximum force that would be applied to this bracket, by calculating the carbon fiber tube and all other tubing being filled with water plus the weight of all the equipment. Our end goal would be to 3D metal print this bracket, but given the limited budget and time we knew that we had to print it with the Markforged and out of Onyx.
Filtration
The filtration subsystem functionality is a low priority for the competition and for this reason goals were prioritized towards lower weight and better reliability. Also, with limited amount of time during the competition, the filter runs a high risk of being clogged and setting the team back on productive time, so the design required low-maintenance and rapid-cleaning if necessary. The simple filter design is a gravity fed filter, so when there is enough water circulating through the system, the team can start directing the contaminated water into the filter. The filter has different sized meshes that will incrementally filter more debris from the extracted water.
Drilling
Team DREAMR inherited a working drill that contained many unstable and haphazard components which could compromise the drill functionality. The main goal of the drilling subsystem was to replace these components with stable and fully functioning parts. First, this required replacing the 3-D printed plastic drill string, which had cracked in operation, with a new interchangeable machined aluminum drill string. Additionally, the drill lacked stability while in contact with the rock interface so a casing stabilizing mechanism was purchased to be attached to the structure and maintain the hole integrity while in operation. This would be accomplished by incorporating an aluminum pipe clamp with rubber lining an eighth of an inch larger in diameter than the drill casing which it would surround to dampen vibrations during operation. Upon drilling the through the overburden and contacting the ice, DREAMR planned to unlatch the casing from the drill string, leaving it downhole for stability and while the heating and extraction equipment moved downhole. Additionally, while the drill bit was removed, leaving the casing in the hole would allow for the removal of cuttings as the bit is pulled up the annulus.
Digital Core
The primary metric we intend to understand is the mechanical specific energy (MSE) of each layer. The data needed to determine this value is displayed in the following equations:
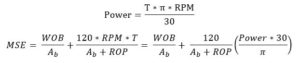
Since the maximum operating weight-on-bit (WOB) of the drill is 16kg, an appropriate 50 kg single-point beam load cell will be implemented to the new design to measure the WOB. The cross-sectional area of the drill bit (Ab) is known, and the rate-of-penetration (ROP) will be determined by using a string potentiometer and the power is able to be determined using a current sensor detecting how much amperage the drill is using.
Electrical
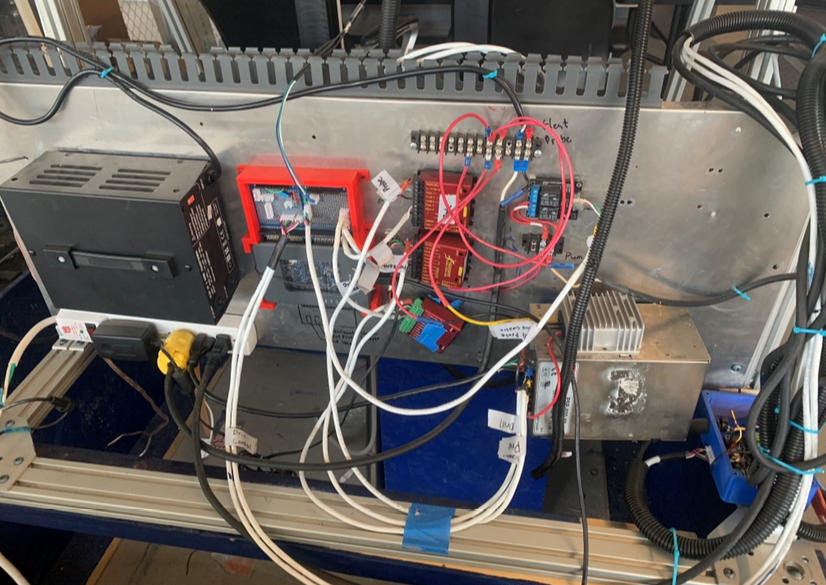
The DREAMR system accepts 120VAC power which is run into a NEMA electrical enclosure inline with a 9A fast blow fuse. The 120VAC supply is connected in parallel with the PLC, 24VDC power supply, and relay modules for the high power AC subsystems. Fuses protect the system in the case of a short, and allow the PLC check line voltages to autonomously output fault messages for rapid troubleshooting. Power is toggled to each subsystem via relays controlled by the PLC depending on the phase of operation. All components utilize DIN rails for mounting on a backplate inside of the NEMA enclosure as seen in Figure 3. Terminal blocks allow for an efficient and organized wiring layout for ease of testing and troubleshooting. This robust design takes advantage of the PLC’s capabilities, trims weight, and allows DREAMR to divert > 90% of the allowed power to productive work at all times.

Next Steps
The next steps in improving the drilling rig are two-fold. Currently, due to the complications created by COVID-19, the team was unable to make many of the planned system operation changes before the competition date. Additionally, the team already had plans for how the rig could be further improved for next year’s Mines competition team following this year’s competition in June. The plans to advance the design further before these complications included rebuilding the structural components with the newly ordered steel as discussed above, machining a fully aluminum drill string, and integrating the drilling, heating, extraction, and filtration systems to operate seamlessly and in a hands-off automated fashion.The majority of the work the team had planned for the weeks leading up to the competition included extensive testing of each subsystem as well as testing of the completely integrated system. Additionally, the team agreed to dedicate much of the remaining work this semester to supporting next year’s team and handing off an effective and well designed drill. The goal is to allow next year’s team to focus on innovative designs that will take the competition to the next level rather than having to worry about the functionality of the drill. The main focus before the competition was planned to be structured toward automation. Due to the complications of the virus we were unable to fully integrate this between subsystems, but the team plans to aid next year’s team by handing off these plans so that they can complete the automation process.
Meet the Team
Matthew Krist
 Matthew is the team lead as well as the structural subsystem lead. He has industry experience working in the oil and gas and the HVAC industry, giving a strong understanding of thermal fluid systems as well as structural design.
Matthew is the team lead as well as the structural subsystem lead. He has industry experience working in the oil and gas and the HVAC industry, giving a strong understanding of thermal fluid systems as well as structural design.
Matthew is majoring in mechanical engineering and will graduate in May 2020.
Tyler Baack
 Tyler is the electrical/control systems lead and has experience in industrial control systems, including experience designing, maintaining, and troubleshooting a variety of electromechanical, extraction, fluid, vacuum, and thermal systems. Tyler has experience with programming and automating PLCs in an industrial setting, knowledgeable in programming languages such as ladder logic, structured text, C, LabVIEW, EES, Python, and Matlab.
Tyler is the electrical/control systems lead and has experience in industrial control systems, including experience designing, maintaining, and troubleshooting a variety of electromechanical, extraction, fluid, vacuum, and thermal systems. Tyler has experience with programming and automating PLCs in an industrial setting, knowledgeable in programming languages such as ladder logic, structured text, C, LabVIEW, EES, Python, and Matlab.
Tyler is majoring in mechanical engineering and will graduate in May 2020.
Sean Cummins
Sean is the digital core lead. He has experience in the marine industries, working on undersea sensor array systems. Working as an intern, his projects included the design, fabrication, and qualification of system components used for the LADWP electrical grid and the US Navy. These experiences have made him knowledgeable in the design and installation of sensor systems for use in extremely harsh environments.
Sean is majoring in mechanical engineering and will graduate in May 2020.
Joel Gomez
 Joel is the extraction and filtration lead and has previously interned with P&G in product and supply engineering. He is the suspension lead of the FSAE team and has expertise in designing, simulating, and the manufacturing of components.
Joel is the extraction and filtration lead and has previously interned with P&G in product and supply engineering. He is the suspension lead of the FSAE team and has expertise in designing, simulating, and the manufacturing of components.
Joel is majoring in mechanical engineering and will graduate in May 2020.
Alison Kakos
Alison is the programming lead and has experience with SolidWorks simulations such as FEA and CFD. She has worked with Arduino systems and is familiar with MATLAB, C++, EES, and LabVIEW. Her minor in Robotics and Automation and experience with robotics will allow her to design and maintain an effective sensor array for the drilling rig.
Alison is majoring in mechanical engineering and minoring in robotics and intelligent systems and will graduate in May 2020.
Joseph Kusbel
 Joseph is the drilling systems lead for the project. He has experience in the oil and gas industry in drilling and reservoir engineering after completing two internships with Chesapeake Energy. Additionally, he has conducted research on Membrane Distillation for water reclamation under a Mines graduate professor. These projects have equipped him with a solid foundation in reservoir, drilling, and fluid systems.
Joseph is the drilling systems lead for the project. He has experience in the oil and gas industry in drilling and reservoir engineering after completing two internships with Chesapeake Energy. Additionally, he has conducted research on Membrane Distillation for water reclamation under a Mines graduate professor. These projects have equipped him with a solid foundation in reservoir, drilling, and fluid systems.
Joseph is majoring in mechanical engineering and will graduate in May 2020.
Sahro Seong
 Sahro is the heating systems lead for DREAMR. He will draw from his experience in heat transfer and thermodynamic analysis to ensure the subsystem can perform with efficiency by performing FEA and CFD simulations to confirm optimal hardware configurations.
Sahro is the heating systems lead for DREAMR. He will draw from his experience in heat transfer and thermodynamic analysis to ensure the subsystem can perform with efficiency by performing FEA and CFD simulations to confirm optimal hardware configurations.
Sahro is majoring in mechanical engineering and will graduate in May 2020.