Deep Brain Stimulation
Overview
Deep brain stimulation is a neurosurgical procedure in which electrodes are implanted into the subthalamic nucleus of the brain. The electrodes provide electromagnetic stimulation that can help suppress the tremors or tics caused by Parkinson’s disease or Tourette syndrome. We were asked to design a small lightweight device that was capable of inserting medical devices into the brain, such as the electrodes for deep brain stimulation, in conjunction with the Polhemus Liberty tracking system. Some requirements included velocity and positional accuracy, precision, and resolution, as well as prevention of buckling of the wire or damage to the device. It also specifies non-interference with the systems it would be used with. Our client for this project was Dr. Andrew Petruska, a professor at the Colorado School of Mines.
Team Members
-
Colby Gottschalk
-
Jesse Hartman-Strawn
-
Justin La Verde
-
Rebecca Prescott
-
Neil Schoenwetter
-
Chad Smith
The Client
- Dr. Andrew Petruska
Acknowledgements
This project was a team effort that required help from outside sources to succeed. We would like to thank Dr. Andrew Petruska, our client, for working with us throughout the design process and holding us to a high standard; Dr. Bahman Rejai, our advisor, for his continuous feedback and help with client communication; Dr. Chris Coulston for his technical expertise and advice; Richard Pratt and Stewart Grimshaw, our graduate student advisors, for their continued feedback and help with the design and its application; and lastly, Eugene Sio at Maxon Group for his help with DC motor operation and high strength magnetic field effects. We would also like to thank the Boettcher Foundation for funding our project.
Elevator Pitch
Design Approach
Due to the high precision required for medical devices, especially those used for neurosurgery, our design approach was particularly dependent on several key requirements. The most important and difficult of these requirements were:
- Needles range from 0.25mm to 5mm in diameter
- 0.2% accuracy in position change
- 0.5 mm minimum step change
- 0.1% accuracy for velocity within 0.5s of command
- 0.5 mm/s minimum velocity
- Software interface with position and velocity control
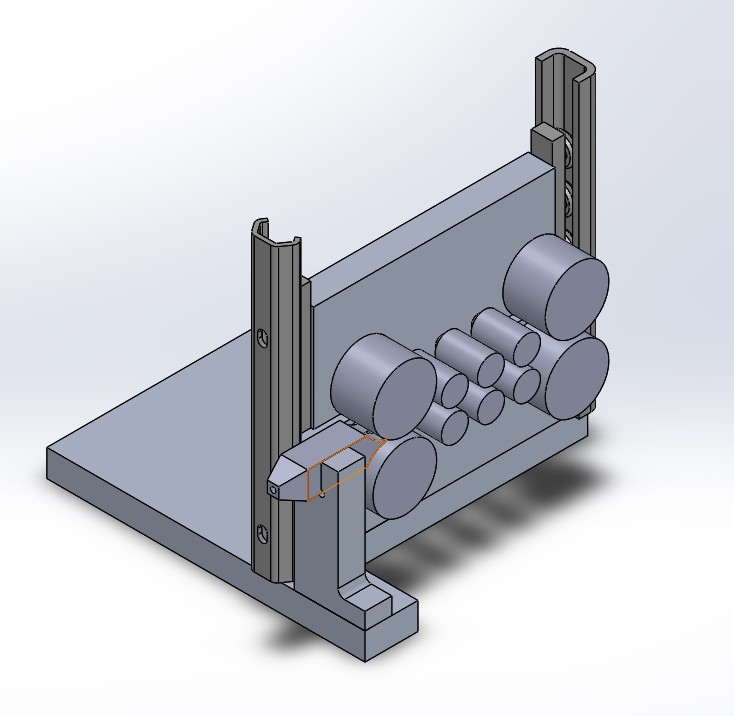
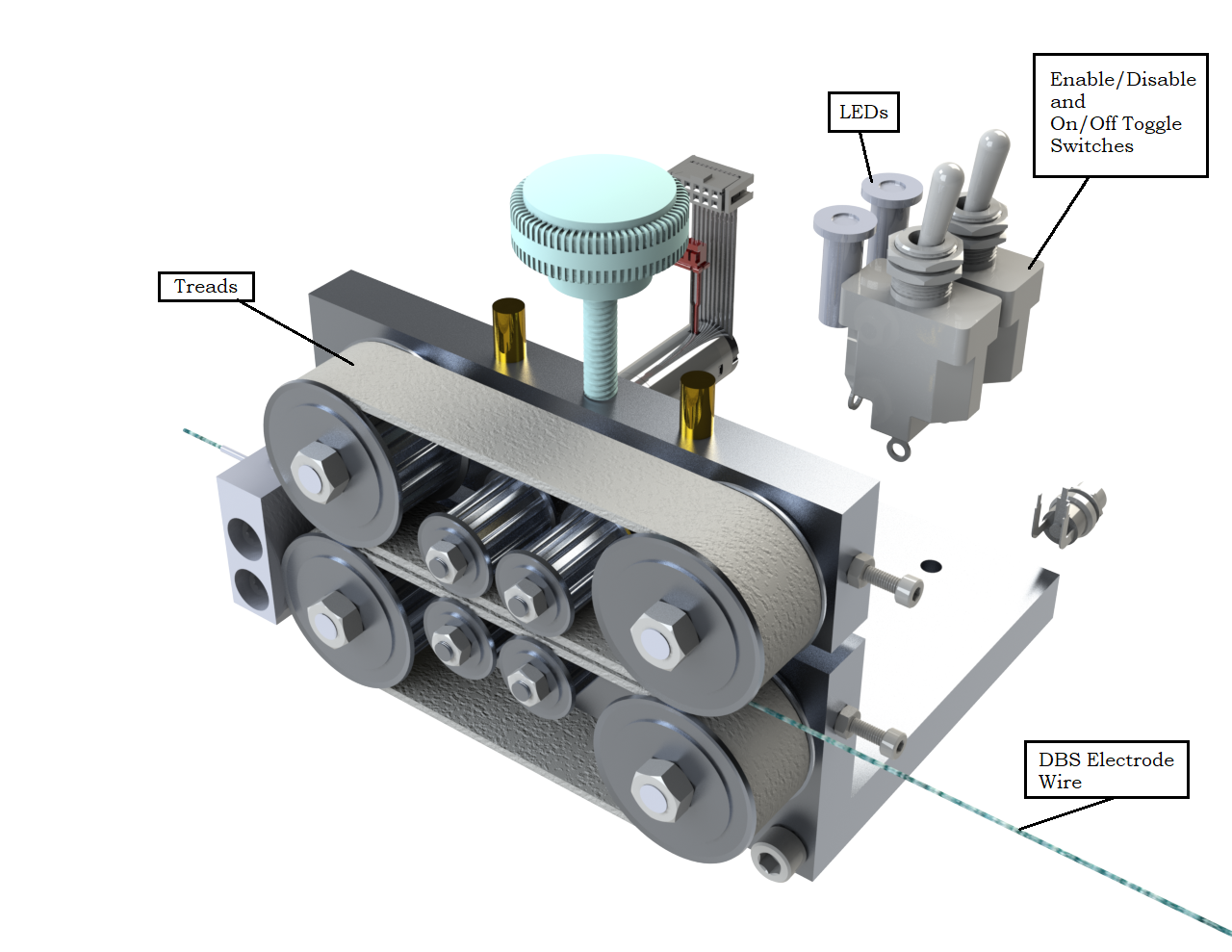
Ideation for this design took us down several paths. At its core, our project asked us to push a rope -both figuratively and literally- and we spent the vast majority of our time in semester one trying to solve this problem. We pursued several ideas. The first was a wheel based design where, in place of treads we instead had wheels. This idea was scrapped because of buckling concerns. We also looked into linear actuators that would pull the wire along rather than push it. While this idea was well-liked but was eventually let go over concerns with the complexity of the design. During the deep design phase we also considered covering each wire in a specially made coating and propelling it with the removal of that coating. The next were our treads, and they took the wheel design and modified it to combat buckling. Eventually, the treads were chosen as they were the best option. The design wasn’t over however, we then went into a design perfect stage. We toyed with the idea of making specially made treads that had groves or teeth, as well as shifting the design slightly to one tread rather than two and geometrically constraining the wire on the other side. All of these were either not manufacturable or added enough complexity that we were concerned that they would create all new problems.

Design Solution
In the pursuit of finishing this project, our team will be completing a drawing package, fabrication instructions, and a complete Bill of Materials.


Next Steps
The next steps of our project would be primarily focused on the fabrication of the device. First we would begin the prototyping phase by ordering parts and machining any custom components. Once all components were complete, they would be measured to verify that they were within specifications. Then the prototype would be assembled, first by subsystem and then as a whole. Once the assembly is complete we could then start the validation of our design requirements and identify potential design shortcomings, allowing us to begin the iteration process and identify improvements which could be made. One such potential improvement would be the inclusion of anti-backlash miter gears which would allow for one dimension of the design to be shrunk considerably.
Meet the Team
Colby Gottschalk

Colby is a graduating Mechanical Engineer at the Colorado School of Mines. A native Texan, Colby moved to Colorado to pursue his love of STEM at Mines and enjoy the natural beauty of the Rocky Mountains. He is planning to pursue a career in biomedical or aerospace.
Jesse Hartman-Strawn
 Jesse Hartman-Strawn is a Mechanical Engineer who graduated from Colorado School of Mines in May 2020. Born in Washington D.C. but having lived most his life in Denver, Jesse has always been interested in math and science. This led to his enrollment in the Colorado School of Mines and subsequent education. Jesse also enjoys hiking, skiing, camping, and other outdoor activities.
Jesse Hartman-Strawn is a Mechanical Engineer who graduated from Colorado School of Mines in May 2020. Born in Washington D.C. but having lived most his life in Denver, Jesse has always been interested in math and science. This led to his enrollment in the Colorado School of Mines and subsequent education. Jesse also enjoys hiking, skiing, camping, and other outdoor activities.
Justin La Verde

Justin is a senior in the Mechanical Engineering Department at Colorado School of Mines. He was born in California but shortly moved to Colorado Springs. His passion for math and physics in high school led him to apply to Colorado School of Mines. After graduating, Justin will be commissioned as a Second Lieutenant in the U.S. Air Force where he will be serving as a Remote Aircraft Pilot.
Rebecca Prescott
 Rebecca is a graduating senior in Mechanical Engineering at the Colorado School of Mines. Born in Colorado, she grew up in Lakewood and often passed by CSM, wholly unaware that it was there at all. Later in life, after discovering a love for robotics and physics, she applied to the school. After graduation she hopes to pursue a career in aerospace or biomechanics. In her free time she enjoys reading, painting, hiking, and bicycling.
Rebecca is a graduating senior in Mechanical Engineering at the Colorado School of Mines. Born in Colorado, she grew up in Lakewood and often passed by CSM, wholly unaware that it was there at all. Later in life, after discovering a love for robotics and physics, she applied to the school. After graduation she hopes to pursue a career in aerospace or biomechanics. In her free time she enjoys reading, painting, hiking, and bicycling.
Neil Schoenwetter
 Neil is a graduating senior at the Colorado School of Mines. Getting his degree in Mechanical Engineering, Neil will be continuing his studies at Mines in the department’s master’s program. Neil is looking to eventually pursue a career in robotics, specifically focusing on human-robot interaction.
Neil is a graduating senior at the Colorado School of Mines. Getting his degree in Mechanical Engineering, Neil will be continuing his studies at Mines in the department’s master’s program. Neil is looking to eventually pursue a career in robotics, specifically focusing on human-robot interaction.
Chad Smith
 Chad is a Mechanical Engineering major graduating May of 2020. In addition to his Mechanical Engineering degree, he will be graduating with a minor in computer science. Chad is passionate about mechanical design, 3d modeling, and programming. In his free time he enjoys dancing, cooking, and working out.
Chad is a Mechanical Engineering major graduating May of 2020. In addition to his Mechanical Engineering degree, he will be graduating with a minor in computer science. Chad is passionate about mechanical design, 3d modeling, and programming. In his free time he enjoys dancing, cooking, and working out.