Magnetically-Steered Endoluminal Device
Overview
The team presents a tip-growing magnetically controlled robot, designed to be implemented for clinical use in the form of an endoscopic camera for procedures such as colonoscopies. This tip-growing design presents a novel solution that eliminates significant friction generated by traditional endoscopes. Application of this robot in medical procedures will result in a more comfortable experience for the patient, removing the need for anesthesia which is financially advantageous. This technology also allows for more intuitive and effective operation.

The goals achieved with this tip-growing solution included a successful extension of 1 meter and magnetic controllability with a handheld magnet. Additionally, this robot will display a live camera-image during operation and its extension can be controlled remotely by any user through teleoperation.
Join our zoom link to control our robot!

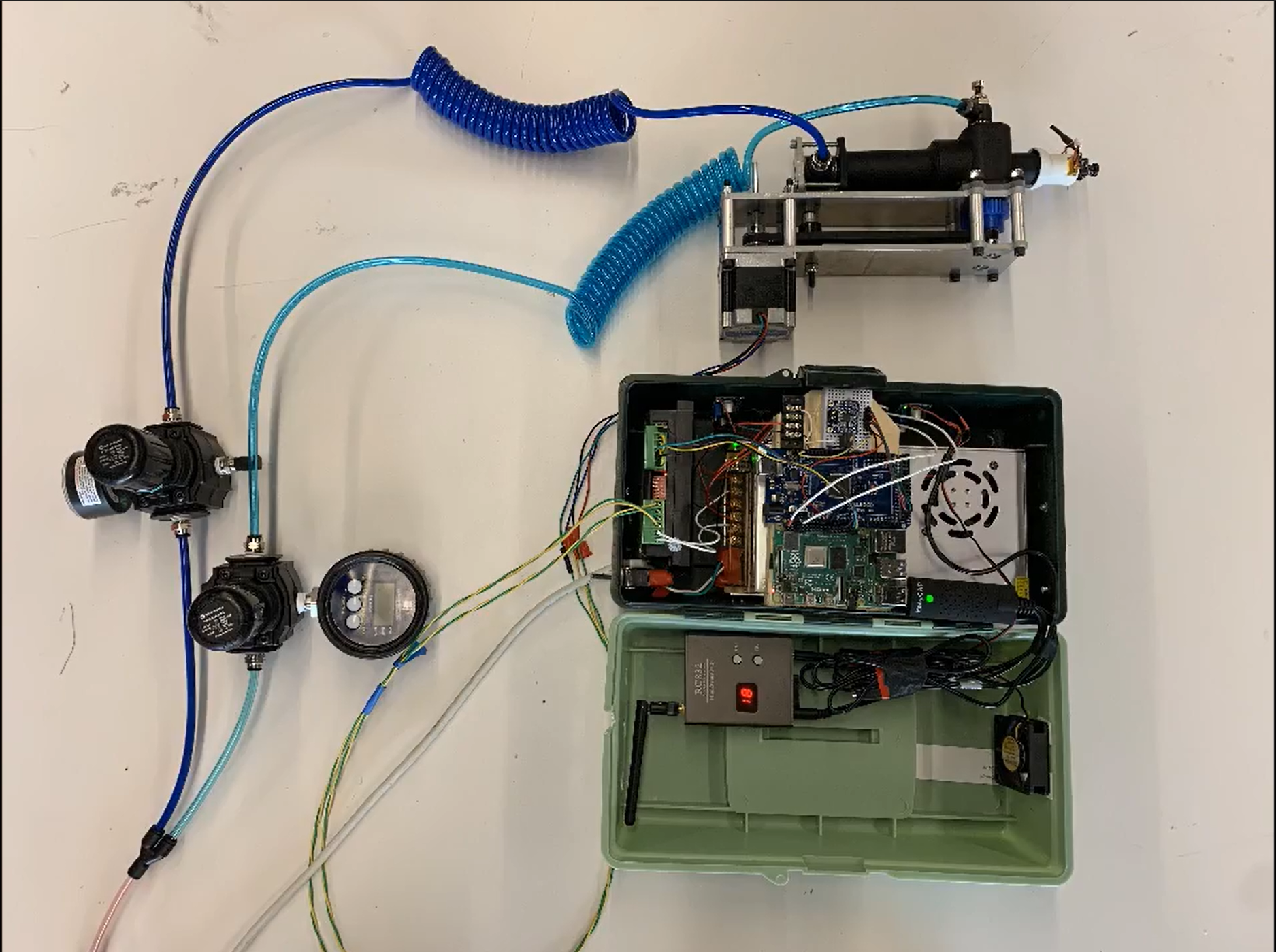
The image above illustrates a system overview of our integrated tip-growing robot technology.
Live Zoom Chat
Use the link below to join us live.
Join from PC, Mac, Linux, iOS or Android with the button below
Or iPhone one-tap: 13462487799,8230740534# or 12532158782,8230740534#
Or Telephone:
Dial: +1 346 248 7799 (US Toll)
or +1 253 215 8782 (US Toll)
Meeting ID: 823 074 0534
Team Members
- Chaney Brugman
- Grant Rawls
- George Marchant
- Harry Dodwell
- Henry Jenkins
- Lance Fausset
- Bill Liebelt
The Client
- Dr. Andrew Petruska
Acknowledgements
Client/Technical Advisor: Dr. Andrew Petruska
Project Advisor: Donna Bodeau
Video
Elevator Pitch
We are a team of seven seniors working since August of 2020 to present a highly-functional and adaptable tip-growing endoluminal device for application in gastrointestinal inspection. This solution focused on proposing an economic, low-friction alternative to the existing traditional colonoscopy procedures. Procedures with traditional devices often require additional pain management and can have poor outcomes due to the friction from pushing a “rope” or wired camera through the intestine. These traditional devices can provide extreme discomfort to the patient and difficulties for the operator. A tip-growing robot mitigates this friction and increases the operators controllability on the extension and steering of the robot through the patient. Our team believes that our novel approach at providing a low-friction solution that is highly functional, flexible, and adaptable during operation is what makes our product an innovative response to a unique design challenge.
As a team we focused our efforts into the following tip-growing robot subsystems: extension and retraction, electronics and software, shape conformity, and tip design. The development and integration of these subsystems is what ultimately allowed us to achieve our goal of high-quality and reliable functionality. Our priorities from the start were to ensure the device could be magnetically controlled as well as achieve 1 meter of successful and reliable extension to optimize the operational effectiveness. We also developed a strong foundation on what achieving a permanent shape of the robot during dynamic extension would require, through our research, testing, and analysis of shape conformity. A dynamic live camera display was also achieved allowing the user to observe the robot’s path while controlling the system’s extension. The tip-growing robot maintained a diameter that is reasonable for its application in inspections of the intestine, thus this dimensional constraint continues to enhance the feasibility of implementing this robot in its proposed operational applications.
By introducing this tip-growing technology platform and foundation to Colorado School of Mines and the M3Robotics Program, our team aspires to promote a novel, controllable technology that will ultimately expand the potential of robotic innovation in medical applications.





Design Approach
 The design approach that the team took involved a significant amount of prototyping and testing, as well as some analysis for future work involving some more theoretical features of device operation. They began by doing some market research to understand the benefits and limitations of current endoscopes as well as current tip-growing robots.
The design approach that the team took involved a significant amount of prototyping and testing, as well as some analysis for future work involving some more theoretical features of device operation. They began by doing some market research to understand the benefits and limitations of current endoscopes as well as current tip-growing robots.
The context gained from the market research then informed a multi-phase design process for the development of the novel device. This multi-phase design process involved three design iterations, each with an individual design phase, a design review phase, an ordering phase, and a testing phase. At the beginning of the overall design process, the team constructed a glass-box diagram to understand how the different components and subsystems of the device would interface with each other and still meet the design requirements that were agreed upon with the client.
This allowed the team to allocate their resources more effectively, especially when determining how many people should be working on each subsystem. At the beginning of each design phase, the subsystem teams would come up with a new design to address the needs of their particular subsystem, making sure to account for integration with other subsystems as well as any pitfalls that were seen with previous design iterations. At the end of the design phase, the team would get together as a whole to discuss and review the designs in more detail to ensure that nothing was overlooked before the necessary components were ordered. After parts arrived, the team would begin the assembly and testing phase, wherein issues were documented, tests were executed in a systematic fashion, and results were collected for analysis and to inform the next phase of the design process.
At the end of the final design phase, tests were performed to ensure that the device was functional and that it met the necessary design requirements.
Design Solution
After the glass-box diagram was created for the device, the team came up with four major subsystems for the device: (1) an extension and retraction subsystem; (2) an electronics and software subsystem; (3) a shape conformity subsystem; and (4) a tip geometry subsystem.
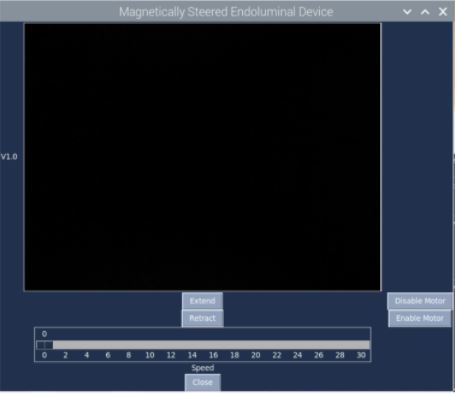
The way that the device works is a sleeve is loaded into a pressurized cartridge and is slowly unloaded by controlling the motor through a GUI. The actuation of the motor corresponds to the rotation of high-friction rollers to control the distance that the sleeve extends. As the sleeve extends, it unfolds on itself and everts, causing it to turn inside out. In order to maintain a rigid tip at the end of the robot, a length of wire is run through the center of the sleeve, serving two purposes: maintaining contact between the tip of the sleeve and the rigid tip geometry as well as allowing for the integration of the camera or any other electronics that are desired at the tip.
Extension and Retraction
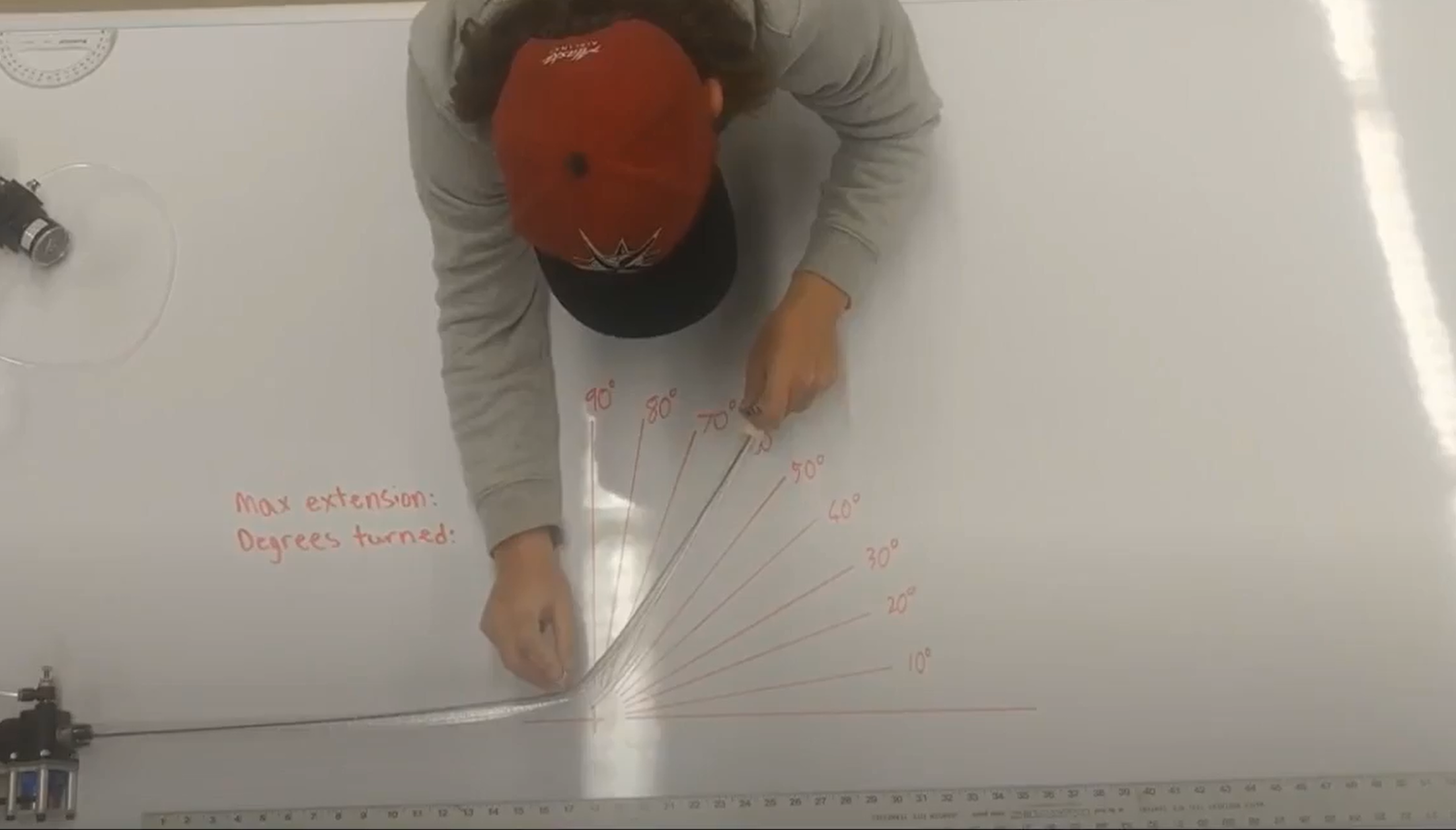
For the extension and retraction subsystem, the extension performance is dependent on the pneumatics of the device, which involves balancing the air pressure between the main sleeve and the center channel of the robot. This balance of pressure along with the rollers and the tension applied to the tip by the camera wire ensure reliable and highly functional extension. Heading and controllability of the robot are achieved through manual, magnetic manipulation using a magnet that is affixed at the tip.
Electronics and Software
For the electronics, the main control system for the device is centered around a Raspberry Pi (RPI). This computer provides an interface for the user to control the speed and extension of the robot. The user interacts with an application on the RPI and the program controls the motor accordingly. The RPI outputs a pulse width modulated (PWM) signal to a stepper motor driver, which in turn controls the motor.
There are two camera options for this robot:
- Wired – a modified off-the-shelf USB endoscope
- The stiff element in the original wire was removed and the camera was rewired to fit inside of the sleeve.
- Benefits from simple design eliminating complicated tip geometry and integration.
- Wireless – off-the-shelf wireless camera module
- The camera camera sits at the tip of the robot with a small battery and transmits analog video to a receiver in the electronics enclosure.
- Video is converted to a digital signal using a USB capture card and displayed in the program on the RPI.
Power for the entire system is provided through a 360 watt, AC to DC 24V power supply. The output from this power supply is fed directly into the stepper driver. It is also stepped down to 5 volts to power the RPI, and 12 volts to power the cooling fan in the electronics enclosure.
Shape Conformity
A separate closed-loop control system was used for testing shape conformity with thermally responsive materials. A heater was used to induce contractions in the material that was attached to the sleeve, allowing for permanent turns to occur in the robot. Although significant testing and analysis were performed on this subsystem and it was in a semi-functional state, the team decided that further development was needed beyond what the scope of the project allowed, leading to the team’s decision to forego it in the present iteration.
Next Steps
There are three main areas that should be developed in the future: extension, shape conformity, and biocompatibility. The extension subsystem was largely successful but needs to be refined. In particular, the rollers used for controlling extension need to be moved in order to improve their consistency and contact with the sleeve.
Although substantial progress was made in this area, the shape conformity subsystem was ultimately not successful, and thus needs the most work moving forward. The team’s research and findings are documented and will be made accessible to propel future efforts and advance this subsystem past previous obstacles and unsuccessful investigations. There are three alternatives that the team proposes as avenues that should be prioritized for shape conformity: heat shrinkable sleeves, concentric sleeves with an ultraviolet-sensitive resin, and shape memory polymers.
The final necessary next step is biocompatibility. In this project there was no requirement for biocompatibility to validate a proof of concept for the tip-growing robot. However, in order for this robot to reach its potential as an endoscope, it must acquire FDA approval and thus be constructed of materials that can go inside the body safely.
Finally, in addition to the design changes that the team suggests as priorities for moving forward, the team will be developing a user manual and operational videos that will facilitate repeatable extension, high performance, and overall maintenance. The team will also be compiling documentation, test results, and findings to develop an accessible, valuable set of resources for the Mines M3Robotics lab. Compiling this information is essential to ensuring that future development can be conducted efficiently and previously seen obstacles can be avoided. Our team is confident that our design will provide a useful foundation for future work.
Meet the Team
Chaney Brugman
 Born and raised in Colorado and moved to Texas in 8th grade to work on my southern “twang”. Coming from Colorado roots, I found myself travelling back to Mines and playing soccer as a center midfielder on the Mine’s Women’s Soccer team. I am graduating this May with a major in Mechanical Engineering and a minor in Materials and Metallurgical Engineering. Since travelling back to Colorado, I have learned to ski and enjoy hiking, biking, and taking advantage of the outdoors. After graduation, I will be travelling to Hawaii and then Alaska for a celebratory adventure! Following travel, I will be moving back to Dallas, Texas and working in a rotational program with Chevron Phillips Chemical.
Born and raised in Colorado and moved to Texas in 8th grade to work on my southern “twang”. Coming from Colorado roots, I found myself travelling back to Mines and playing soccer as a center midfielder on the Mine’s Women’s Soccer team. I am graduating this May with a major in Mechanical Engineering and a minor in Materials and Metallurgical Engineering. Since travelling back to Colorado, I have learned to ski and enjoy hiking, biking, and taking advantage of the outdoors. After graduation, I will be travelling to Hawaii and then Alaska for a celebratory adventure! Following travel, I will be moving back to Dallas, Texas and working in a rotational program with Chevron Phillips Chemical.
Grant Rawls
 Grant Rawls is completing his undergraduate degree in Electrical Engineering with a minor in Computer Science. He is currently involved as an executive member of the IEEE, Active Minds, and Ice Cream Clubs on campus. After graduation he looks foward to working at Motorola Solutions as a software engineer in Fort Collins, CO.
Grant Rawls is completing his undergraduate degree in Electrical Engineering with a minor in Computer Science. He is currently involved as an executive member of the IEEE, Active Minds, and Ice Cream Clubs on campus. After graduation he looks foward to working at Motorola Solutions as a software engineer in Fort Collins, CO.
George Marchant
 I’m a senior graduating in May with a major in Mechanical Engineering and I will begin the Robotics MS-NT program at Mines this August. I spent time working for a startup in Denver building bio-data collection devices which motivated my pursuit for further studies in robotics; I hope to build a career within this field in the future and this project was a perfect opportunity to get hands-on experience. Outside of studies, I play on the Men’s soccer team who were recently crowned RMAC tournament champions.
I’m a senior graduating in May with a major in Mechanical Engineering and I will begin the Robotics MS-NT program at Mines this August. I spent time working for a startup in Denver building bio-data collection devices which motivated my pursuit for further studies in robotics; I hope to build a career within this field in the future and this project was a perfect opportunity to get hands-on experience. Outside of studies, I play on the Men’s soccer team who were recently crowned RMAC tournament champions.
Harry Dodwell
 Harry Dodwell is completing his undergraduate degree in Electrical Engineering with a minor in Computer Science. He is currently leading the automation of production processes at a snowboard startup in Denver and is planning to continue working there while he completes his masters in Electrical Engineering in the fall. In the future Harry hopes to pursue a career focused on robotics and automation.
Harry Dodwell is completing his undergraduate degree in Electrical Engineering with a minor in Computer Science. He is currently leading the automation of production processes at a snowboard startup in Denver and is planning to continue working there while he completes his masters in Electrical Engineering in the fall. In the future Harry hopes to pursue a career focused on robotics and automation.
Henry Jenkins
 Henry Jenkins is completing his bachelor’s degree in Mechanical Engineering with a minor in Biomechanical Engineering. He is currently involved with the University Innovation Fellows and ASME, and has worked in multiple research labs throughout his undergraduate career. After graduation, he hopes to do design work in the medical device field before returning to graduate school to continue his studies.
Henry Jenkins is completing his bachelor’s degree in Mechanical Engineering with a minor in Biomechanical Engineering. He is currently involved with the University Innovation Fellows and ASME, and has worked in multiple research labs throughout his undergraduate career. After graduation, he hopes to do design work in the medical device field before returning to graduate school to continue his studies.
Lance Fausset
 Lance Fausset is graduating with a B S in mechanical engineering. He has been an active member of the Mines Water Polo team for the past four years. Lance has worked for NAVAIR weapons where he was a member of the Surface Targets Division as well as worked Current Systems Inc, which is one of the leading lazy river contractors. After graduation, he is looking to pursue a career involving mechanical systems, fluids, or to enter the aerospace industry.
Lance Fausset is graduating with a B S in mechanical engineering. He has been an active member of the Mines Water Polo team for the past four years. Lance has worked for NAVAIR weapons where he was a member of the Surface Targets Division as well as worked Current Systems Inc, which is one of the leading lazy river contractors. After graduation, he is looking to pursue a career involving mechanical systems, fluids, or to enter the aerospace industry.
William (Bill) Liebelt
 Bill Liebelt is a senior in Mechanical Engineering from Palo Alto California who has worked at SLAC, Curative INC, and Skytrans during his undergraduate studies. He will graduate this May with a bachelors in Mechanical Engineering, and hopes to find a job designing mechanical systems in aerospace, or medical related fields.
Bill Liebelt is a senior in Mechanical Engineering from Palo Alto California who has worked at SLAC, Curative INC, and Skytrans during his undergraduate studies. He will graduate this May with a bachelors in Mechanical Engineering, and hopes to find a job designing mechanical systems in aerospace, or medical related fields.
Supplementary Videos
These videos highlight the eversion of the tip-growing robot illustrating extension and functionality of the device.