Autonomous Surface Vehicle
Overview
How can an environmental engineering firm automate the task of collecting on-site ecological data from freshwater reservoirs? The Autonomous Surface Vehicle (ASV) is a water vehicle capable of autonomously carrying a sensor payload between user-specified GPS waypoints in a water reservoir, saving Pinyon Environmental the labor of taking measurements manually.
Why an ASV?
- Pinyon Environmental, Inc. is tasked with monitoring freshwater reservoirs in the Denver area
- Current monitoring technique is to deploy a pair of engineers in a rowboat. One rows the boat between observation points, the other operates measurement equipment.
- Rowboat method is unnecessarily time and labor intensive, stands in the way of more important engineering work
- An ASV can perform the task faster, and requires only one engineer to visit the site.
- In the future, it may be possible to eliminate the site visit altogether.
The project was introduced in the F2018 Senior Design cycle, which produced a prototype hull and data collection system. The F2019 team was tasked with implementing the propulsion, steering, and guidance systems, in addition to improving the existing prototype.
Elevator Pitch
The Autonomous Surface Vehicle is a student-designed solution to automate Pinyon Environmental’s water reservoir monitoring missions. The vehicle is capable of performing autonomous missions to carry a sensor array to user-specified GPS waypoints in a water reservoir. It is user-controllable via long-distance radio control, and a custom battery enables it to perform hour-plus autonomous missions. Working from a basic prototype created by a previous senior design team, the F19 team designed and implemented novel solutions for the vehicle’s structure, propulsion, steering, and guidance systems. A functioning, complete prototype was produced, in addition to a suite of digital models & simulations, extensive technical and user-documentation, and plans for future iterations of the ASV design.
Team Members
- Kendrick Au
- Alex Fryer
- Evan Lim
- Alec Mullen
- Walter Pennington
- TomHenry Reagan
The Client
- Pinyon Environmental
Acknowledgements
Project Advisor: Robin Steele
Technical Advisor: Prof. Chris Coulston
Documents
What We Learned
Design Approach
Project management was a key factor in successful completion of a working prototype. Key project management strategies included:
- Subsystem-level Organization
- Created achievable goals by redefining large tasks into subsystem-level requirements.
- Divided subsystem work along team members’ areas of expertise
- Chunked project timeline into three-week ‘sprints’; devised subsystem-level deliverables to be completed in each sprint period.
- Adapted the Scrum methodology by setting twice-weekly deliverable checkpoints to manage team progress
- Design for Implementation
- Made simple, replicable design choices so that the client can manufacture their own vehicles in the future
- First achieved minimum viability, then improved through iterative design
- Frequent Client Collaboration
- Hosted client representatives at sprint review meetings every three weeks
- Sought client approval when making major design decisions
At the project onset, client needs were translated into a high-level design. The system was divided into five subsystems: (1) propulsion, (2) steering, (3) guidance, (4) data collection, (5) hull. The following design flow was applied to each subsystem:
- Translate high-level design criteria into specific, actionable statements of subsystem functionality.
- Brainstorm designs which may implement the required subsystem functions.
- Create a set of suitability metrics for evaluating the designs against their intended functions and other requirements — e.g. cost, stability, and replicability for the hull subsystem.
- Rate each design on each of the suitability metrics, and place the results in a decision matrix. Move forward with the subsystem design which has the highest average score across all metrics.
After finalizing the high-level design, a variety of engineering techniques were used to evaluate the ASV design before and during prototyping:
- Hull and propulsion subsystems evaluated using a combination of hand calculations and CAD simulations.
- Evaluations included a water flow assessment, thermal expansion calculations, and an estimation of the motor mount shear strength.
-
Battery designed using power relationships (P = IV, V = IR, etc.) to work backwards from client need statements to battery specifications.
-
Worked with a battery specialist to choose a safe and suitable battery configuration.
-
Steering and guidance subsystems modeled off of well-established guidelines for quadcopter design
-
Selected functional components based on co-compatibility and client need statements
- Used testing and user-feedback to iterate on prototypes
- Invited client to interact with prototypes and provide their own feedback
For instance, custom aluminum connections for the motor mounting rods were created after the client indicated that they had had negative experiences with using off-the-shelf steel connectors in similar environments.
Design Solution
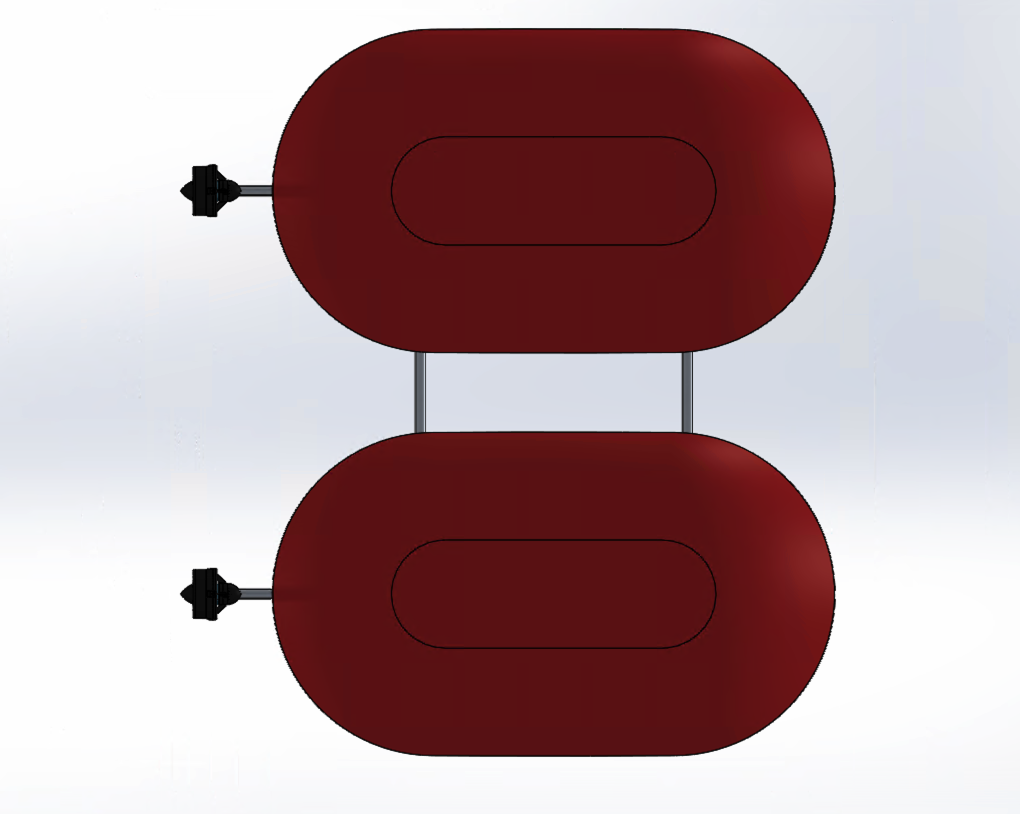
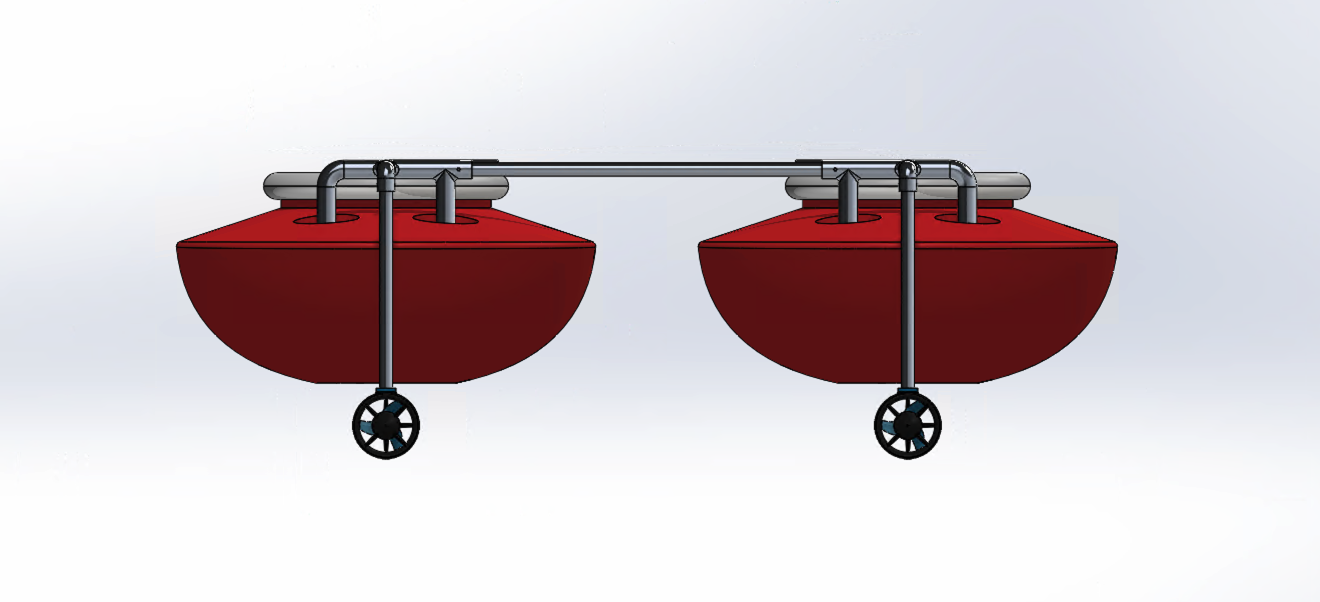
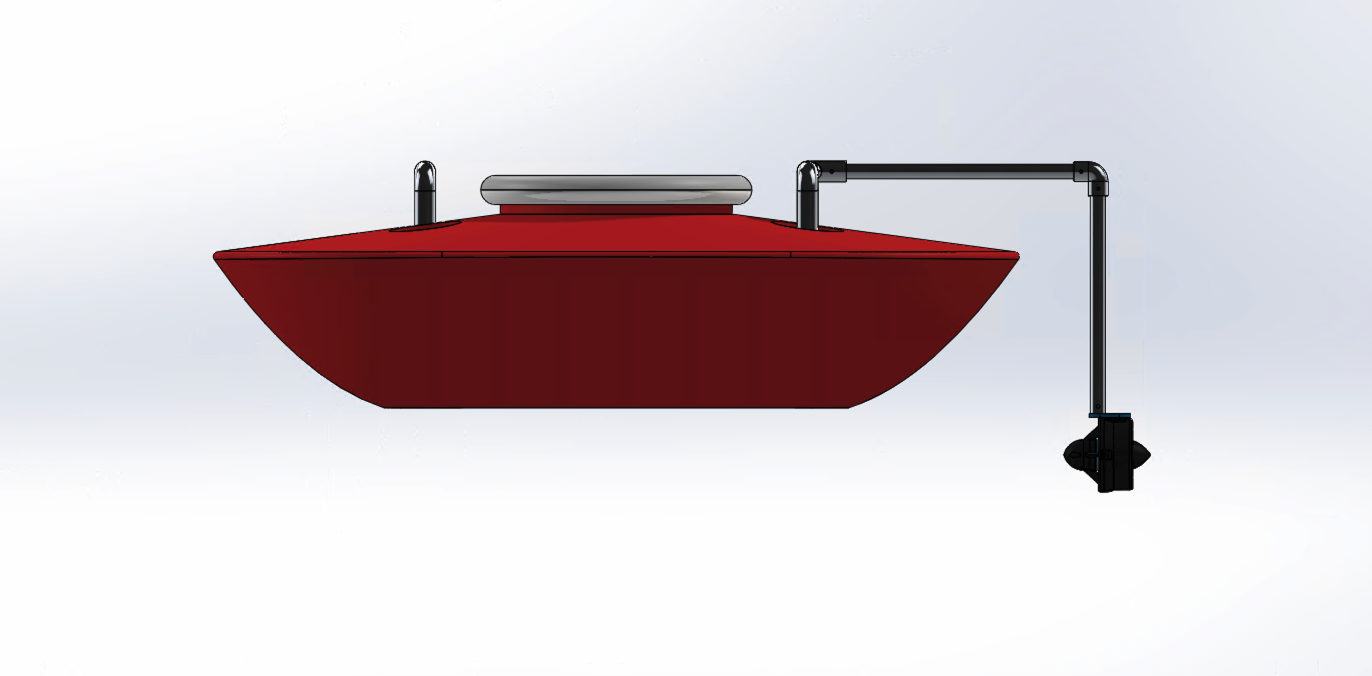
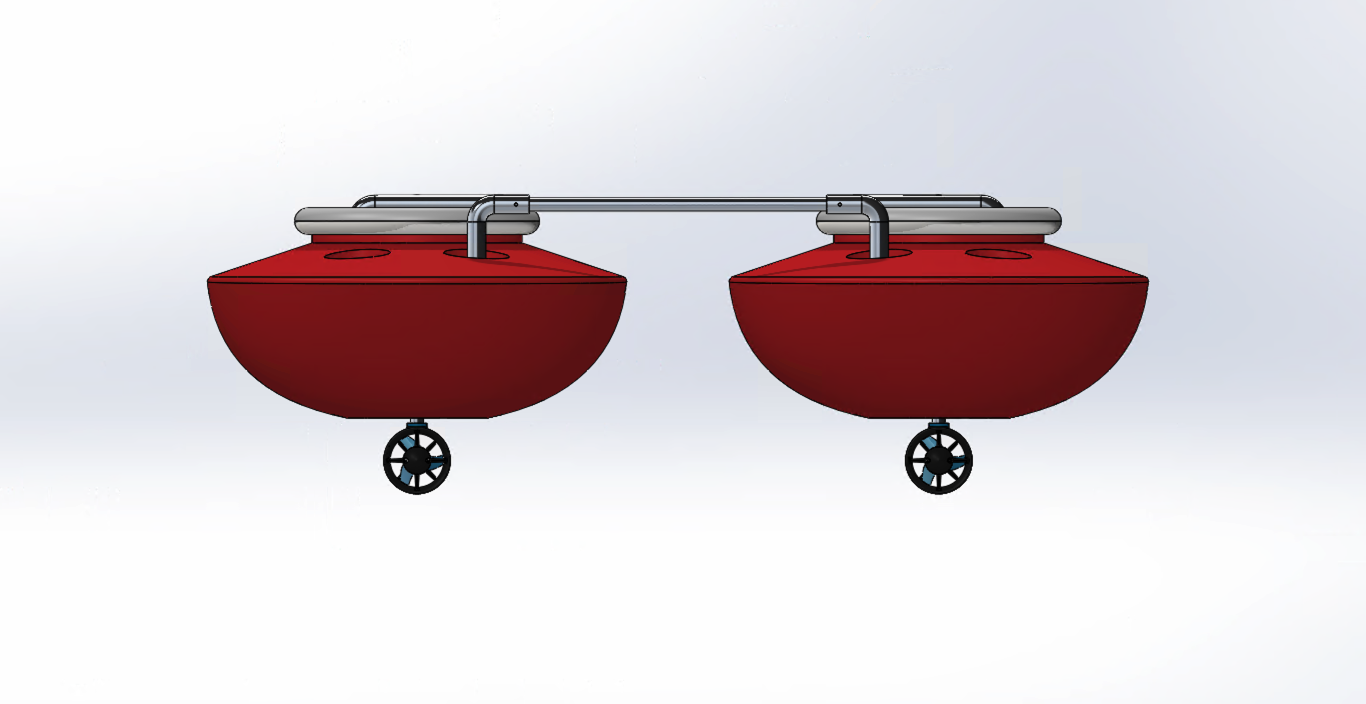
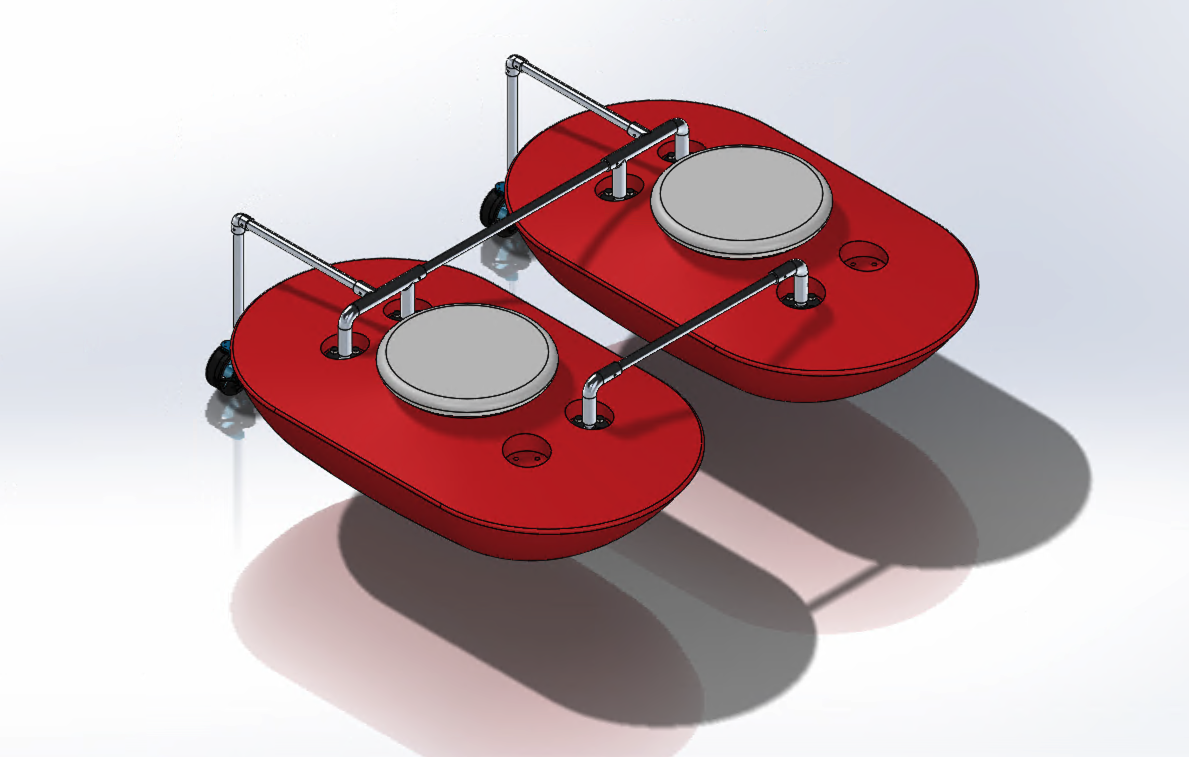
The final ASV design is a twin-propeller, battery-powered catamaran, programmed or manually controlled via radio control. Key ASV design features include:
- Catamaran hull made from modified kayak coolers;
- Custom-made 16V, 40Ah, 5 cell LiFe battery for 1hr+ mission time;
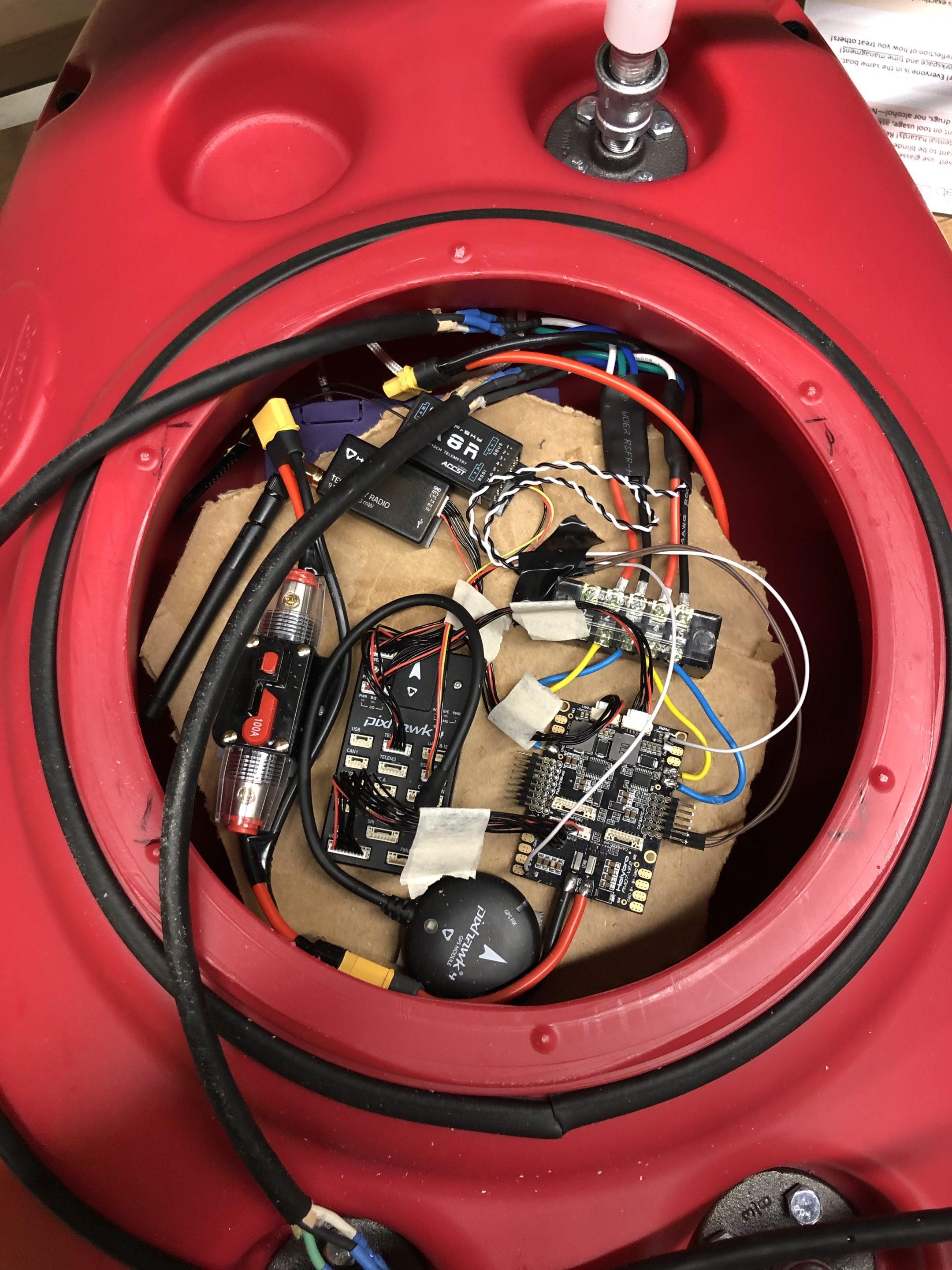
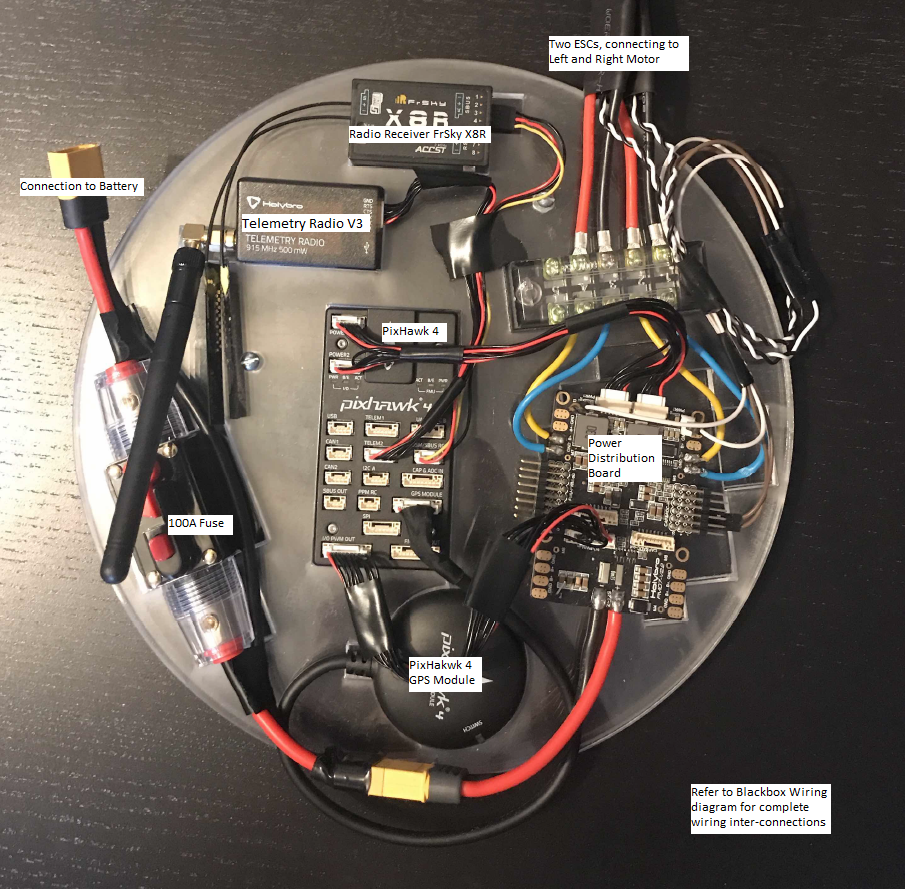
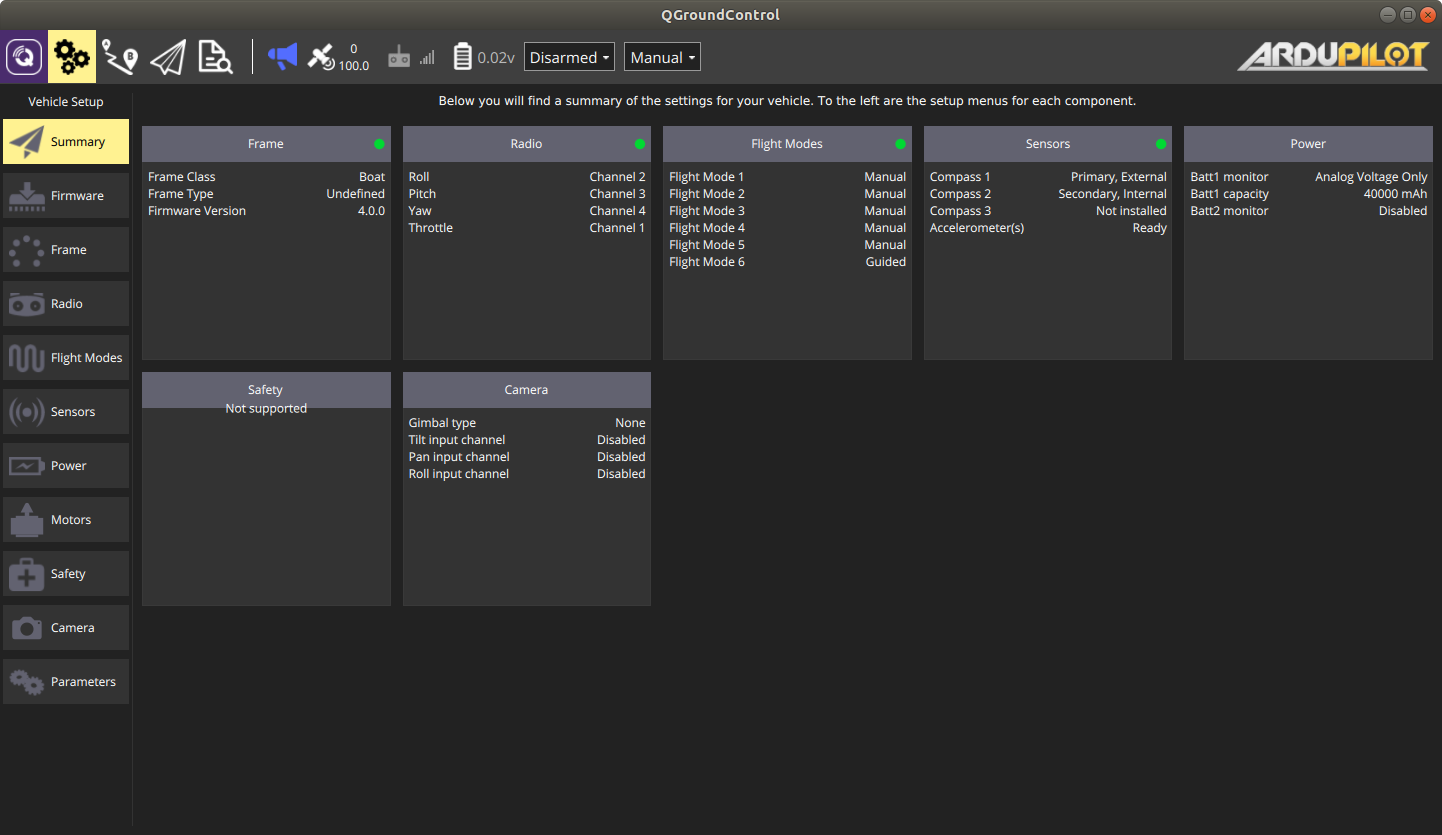
- PixHawk 4 flight controller running ArduPilot open-source firmware;
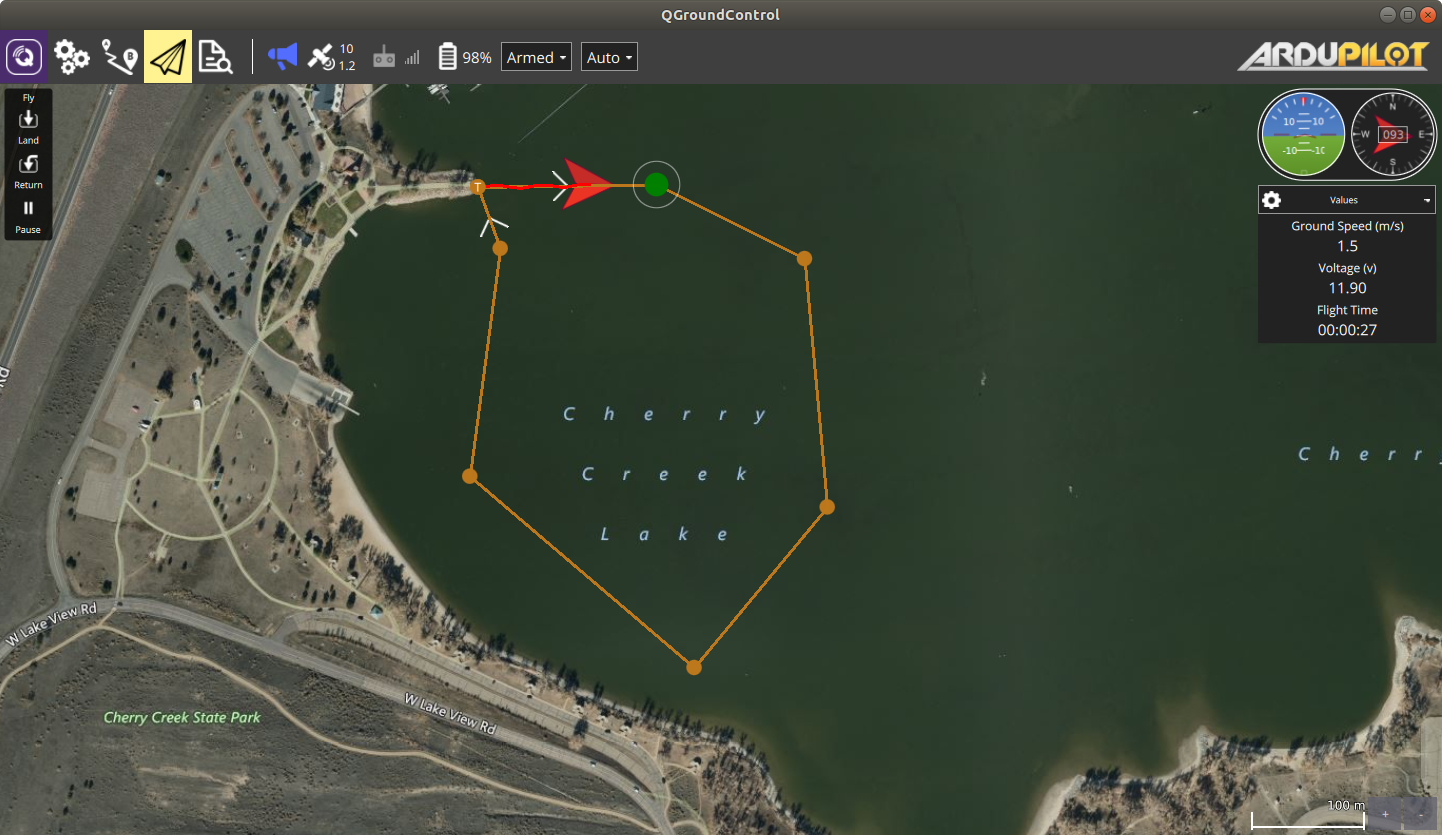
- Remotely programmable missions via QGroundControl open-source mission planner;
- Twin screw-drive electric motors mounted on outrigger arms;
- Manual remote control via handheld radio transmitter;
Say an engineer wants to run an autonomous mission to collect ecological data in a reservoir. First, they connect the battery and power on the ASV. Then, they open the mission planner software on their laptop ground station and establish a radio link with the ASV. To program the mission, they specify GPS waypoints on a satellite map. When the mission is run, the ASV will travel autonomously to each waypoint. In the meantime, the engineer can track the mission progress on the ground station laptop. If desired, the ASV can be manually controlled using a dual-joystick radio transmitter.
The following video shows a demonstration of the first functional prototype, dating from February 2020. The second functional prototype is showcased in the video at the top of this page.
The project began with an operating budget of $4500 to cover all costs associated with design and manufacture of a fully-functioning prototype. The team estimated a total cost-to-completion of $2500 in the preliminary design phase. The following table summarizes the budget to date:
|
Budget Summary |
|
|
Total Initial Funds |
$4500 |
|
Projected Cost (c. Oct 2019) |
$2500 |
|
Cost to date |
-$2461 |
|
Projected Remaining Cost |
-$14 |
|
Diff from Budget |
+$19 |
|
Diff from Total Funds |
+$2019 |
The following CAD simulations showcase the virtual testing process for the hull and propulsion subsystems.
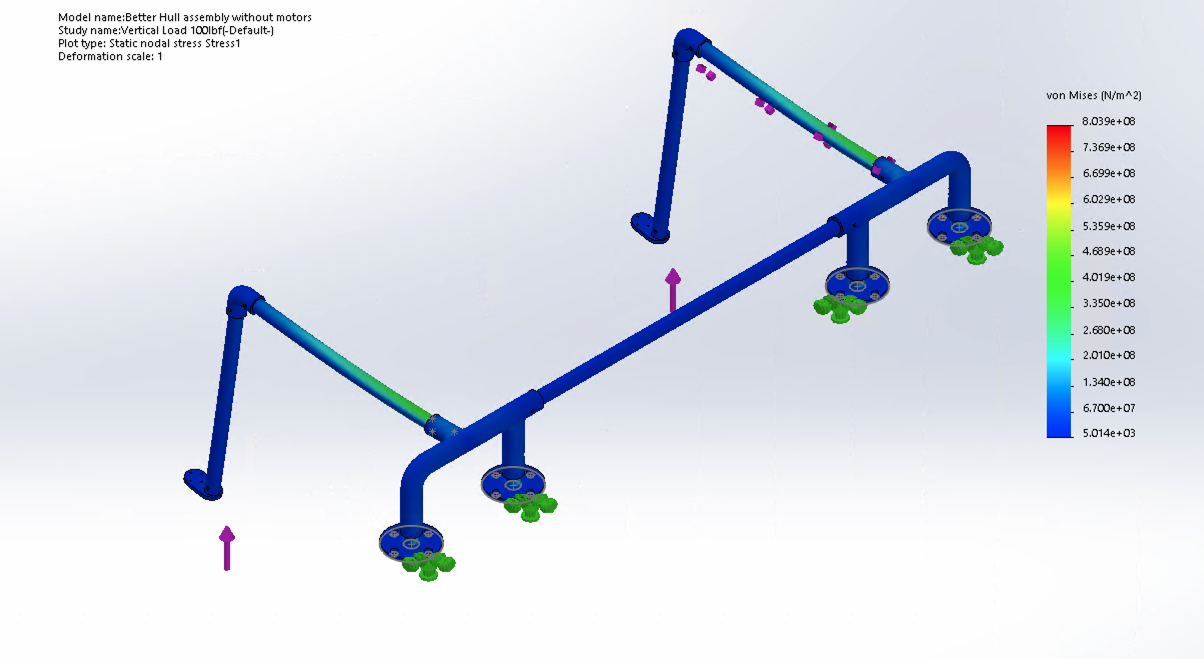
CAD Simulation Vertical Load 100lb Stress
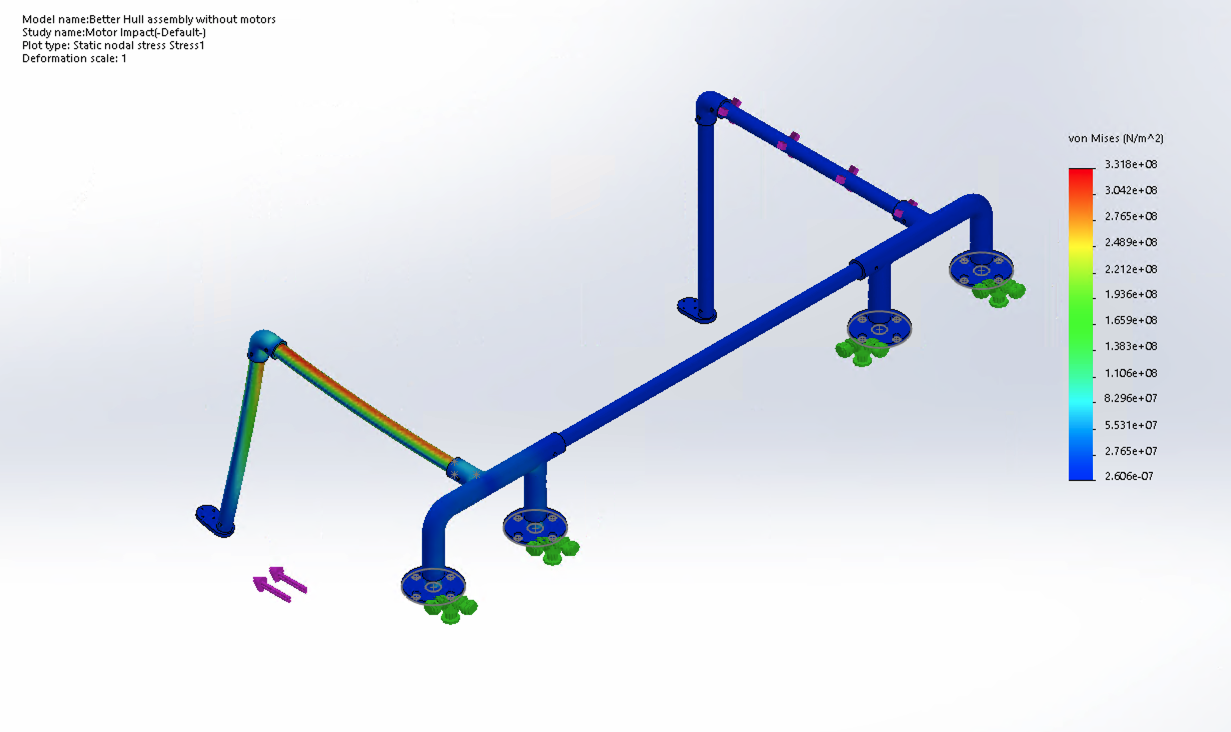
CAD Simulation Motor Impact 100 Stress
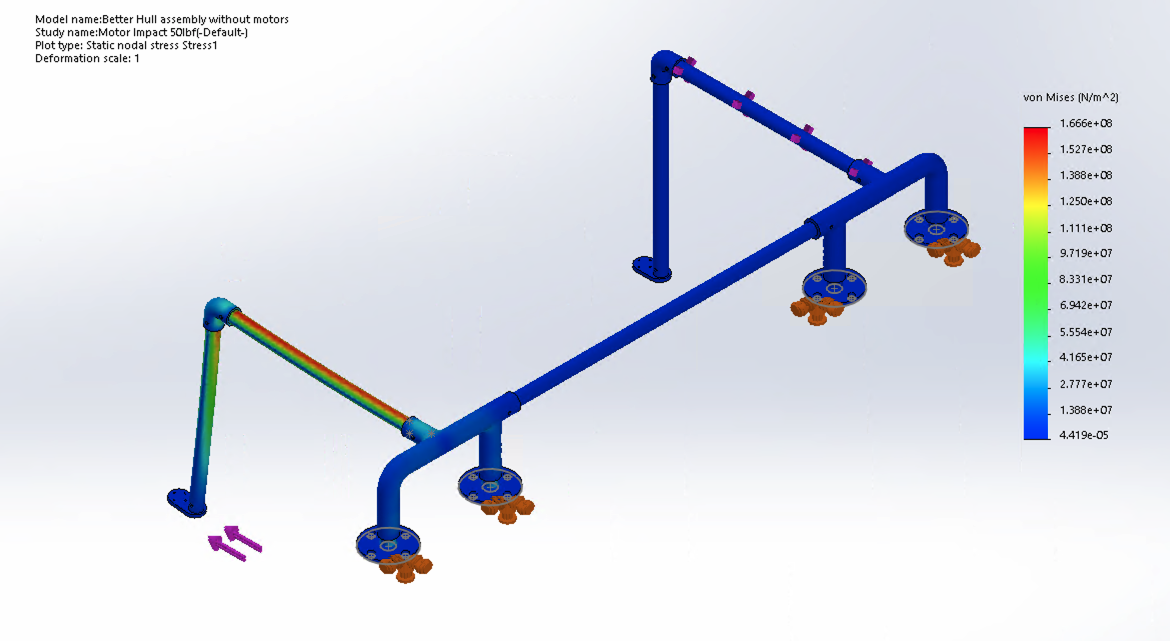
CAD Simulation Motor Impact 50lb Stress
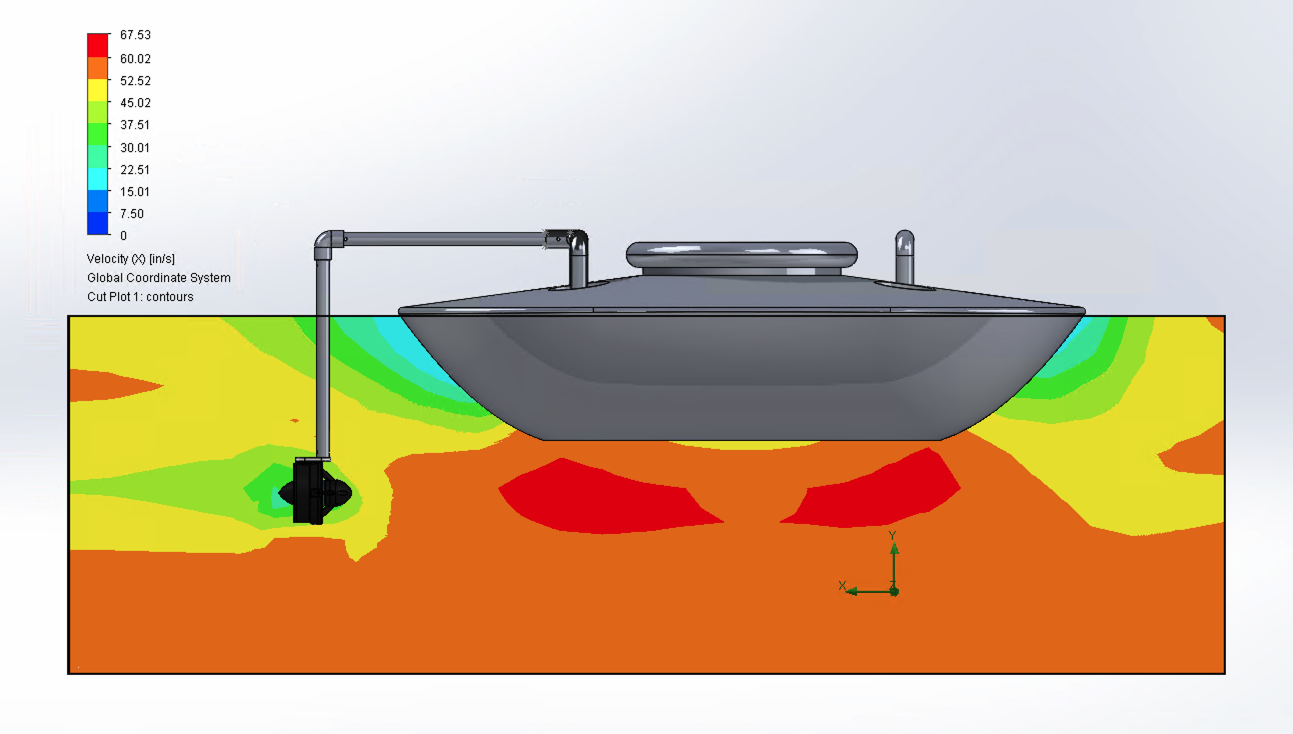
CAD Simulation Full Load
Next Steps
Due to the limitations placed on us by the ongoing stay-at-home order, some of the original project goals have not been met, and prototype construction was ended earlier than expected. The following table summarizes the current status of unsatisfied client needs:
It is necessary to recognize the limitations set on the project by the ongoing stay-at-home order. The following table summarizes the current status of design criteria:
|
Design Criteria (the ASV…) |
Current Status |
|
Operates in a body of water the size of Cherry Creek reservoir |
Implemented; untested. |
|
Can tow a 40 lb sensor array |
Implemented; untested. |
|
Holds waypoint position (within tolerance) for duration of data collection |
Implemented, untested. |
|
Incorporates and builds upon the previous Senior Design prototype |
The data collection system from the previous prototype is yet to be incorporated. |
The team has communicated with the client to identify potential future improvements to the project. Some of these action items seek to improve the existing design, while others add entirely new subsystems. Ultimately, Pinyon is interested in pursuing a fully-automated data collection system that does not require a site-visit for every mission. These tasks will be pursued by a future design team.
Future action items:
- Create a solar-charging station for the ASV
- Enable engineers to plan missions from the office, without performing a site visit
- Add tension cables to the hull-mounts to prevent racking
- Re-cast aluminum connector pieces
- Create a mounting bracket for the fifth battery cell (currently one cell is not being used)
- Assemble the electronics mounting panel
- Finish the testing procedures as described in the IDR and FDR
In the interest of seeing the project continue successfully into the future, extensive handoff documentation has been created and is available in the downloads section of this site.