Remote Controlled Powered Wheelbarrow
Overview
For this project, our design team was tasked to create an electric remote-controlled wheelbarrow capable of moving typical loads such as gravel, mulch, and soil up to 400 pounds. The wheelbarrow specifications required that it be able to move from a loading point to a dumping point and remotely dump the load using a remote control-interface.
Our design consists of a metal chassis and bucket with electric motors for propulsion. The design uses skid-style steering, as well as an electric dumping mechanism controlled by linear actuators. The rechargeable batteries on board allow for multiple hours of use time. The rugged tires allow for the wheelbarrow to travel up steep grades on softer surfaces such as grass or gravel. The design incorporates brakes and a failsafe mode in case of signal loss for safety.
Our design is unique because, unlike other electric wheelbarrows, ours is completely remote controlled, excluding the latches, and does not require the user to move along with the wheelbarrow to use it. Our design is also unique because it has an electric dumping mechanism which does not require physical effort by the user.
Live Zoom Chat
Use the link below to join us live from 8:00 – 10:30 a.m. on April 29.
Join from PC, Mac, Linux, iOS or Android: https://mines.zoom.us/j/97751516758
Or iPhone one-tap: 16699006833,97751516758# or 12532158782,97751516758#
Or Telephone:
Dial: +1 669 900 6833 (US Toll) or +1 253 215 8782 (US Toll)
Meeting ID: 977 5151 6758
International numbers available: https://mines.zoom.us/u/aiakrAr3P
Or a H.323/SIP room system:
H.323: 162.255.37.11 (US West) or 162.255.36.11 (US East)
Meeting ID: 977 5151 6758
Team Members
- Jacob Farabaugh
- Sydney Harris
- Jacob Jessing
- Elias Johnson
- Joseph Lovelace
- Heather Schneider
- Isaiah Wier-March
The Client
- Marcus Florida
Acknowledgements
{kind=link}
Project Advisor: Kevin Moore
Technical Advisor: Marcus Florida
Video
Elevator Pitch
The Wheelburros’ goal with the remote controlled powered wheelbarrow was to create a device that was novel in some way to the market and meet all requirements of the client. In order to create the product desired, it was necessary to go through multiple iterations of design and multiple stages of testing. After these design iterations, it was decided to have the wheelbarrow dump the material by lifting the bucket similar to a dump truck and have two caster wheels in the back with two powered drive wheels in the front. The electrical system would be battery powered by 24-volts with a 70 amp-hour capacity. This would power the gear motors and linear actuators for the dump mechanism. Other than the mechanical latches that keep the bucket door closed when driving, the team accomplished the primary goal of a fully remote controlled wheelbarrow.
Design Approach
The team started the design process by looking into similar devices to what already exists. This ensured that the design would be unique to the market. Quickly, it became apparent that remote controlled material transportation with a dumping system would be novel to the market. From here, the team would begin to consider some of the most important features necessary for a reliable, efficient, and rugged product. The first step to this was developing a user script, to allow a common understanding for what the product should be able to accomplish.
User Script:
- Power on/initialize: turn on the batteries with the switch located on the system, turn on the remote control transmitter
- Ensure secure bucket: Check that the pins for the dump bucket are secure
- Drive to loading area: Control wheelbarrow to drive to load area using throttle control to each wheel
- Hand load materials: Get to work
- Drive to location: Control wheelbarrow to drive to dump area
- Dump materials: Unsecure dump bucket pin then either use hand levers to manually dump or use assisted linear actuators to assist dumping
- Repeat 2-6 until done using
- Turn off remote control and turn off power to motors
- Store
From here, the team was able to break apart important subsystems of the wheelbarrow to simplify the design process. These subsystems were as follows: the wheelbarrow chassis, bucket and dumping mechanism, driving and steering, power and control, radio control, and motors.
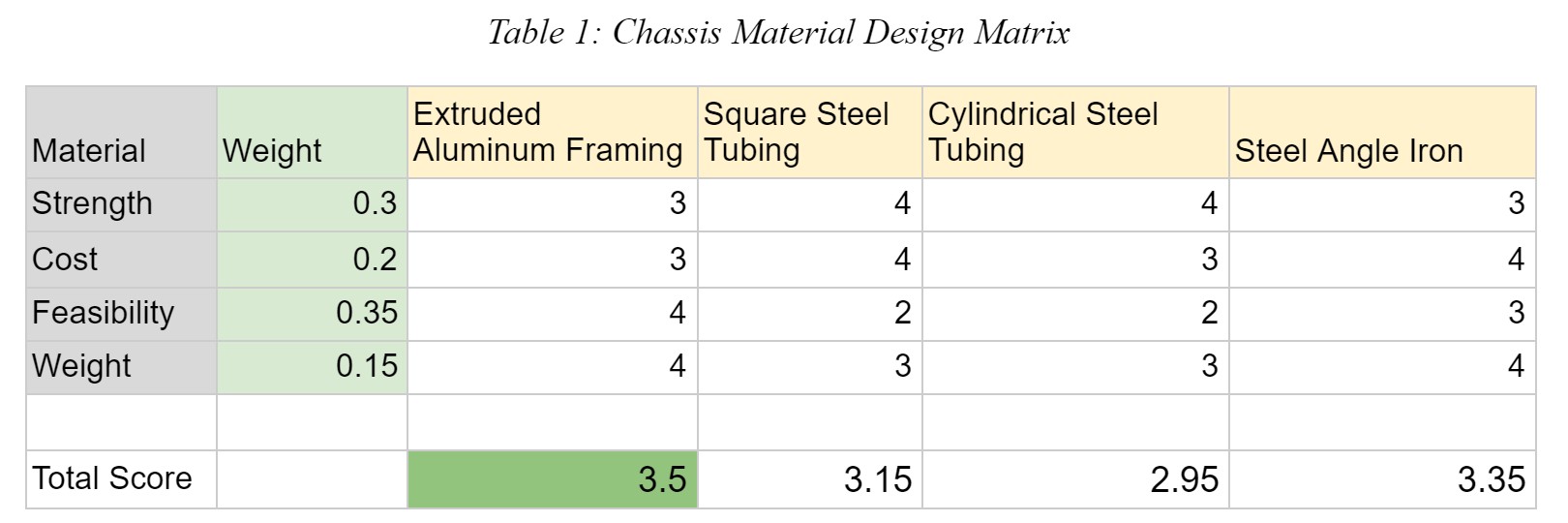
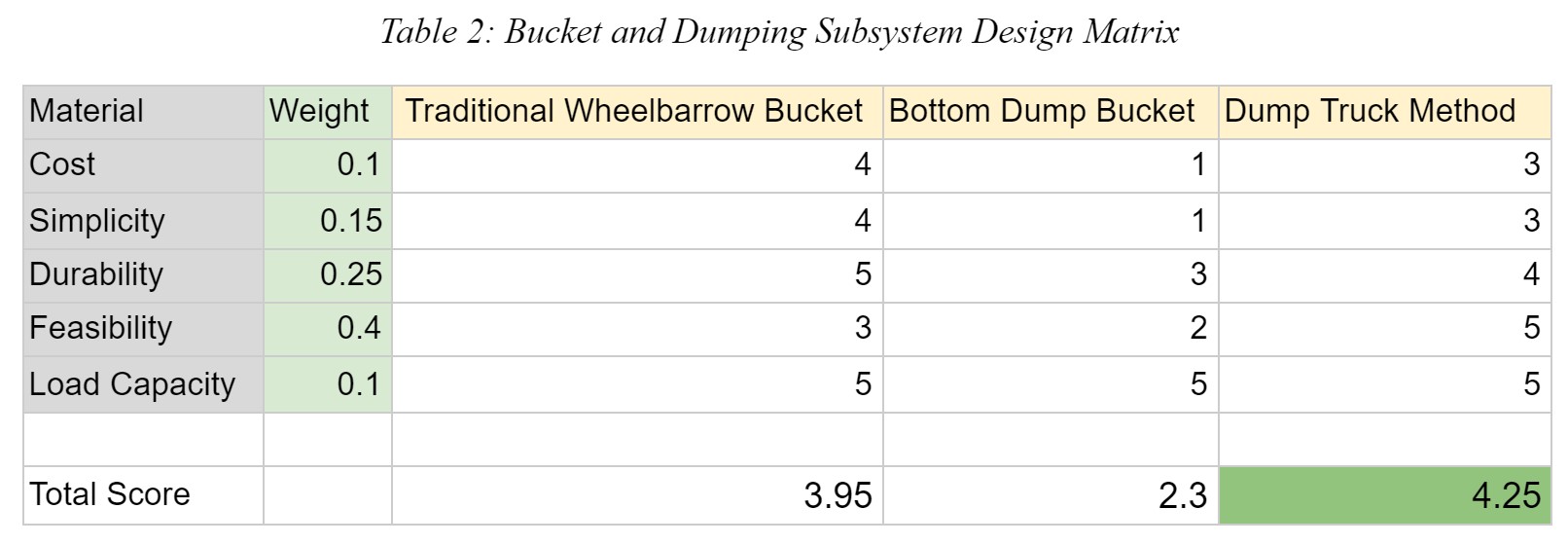
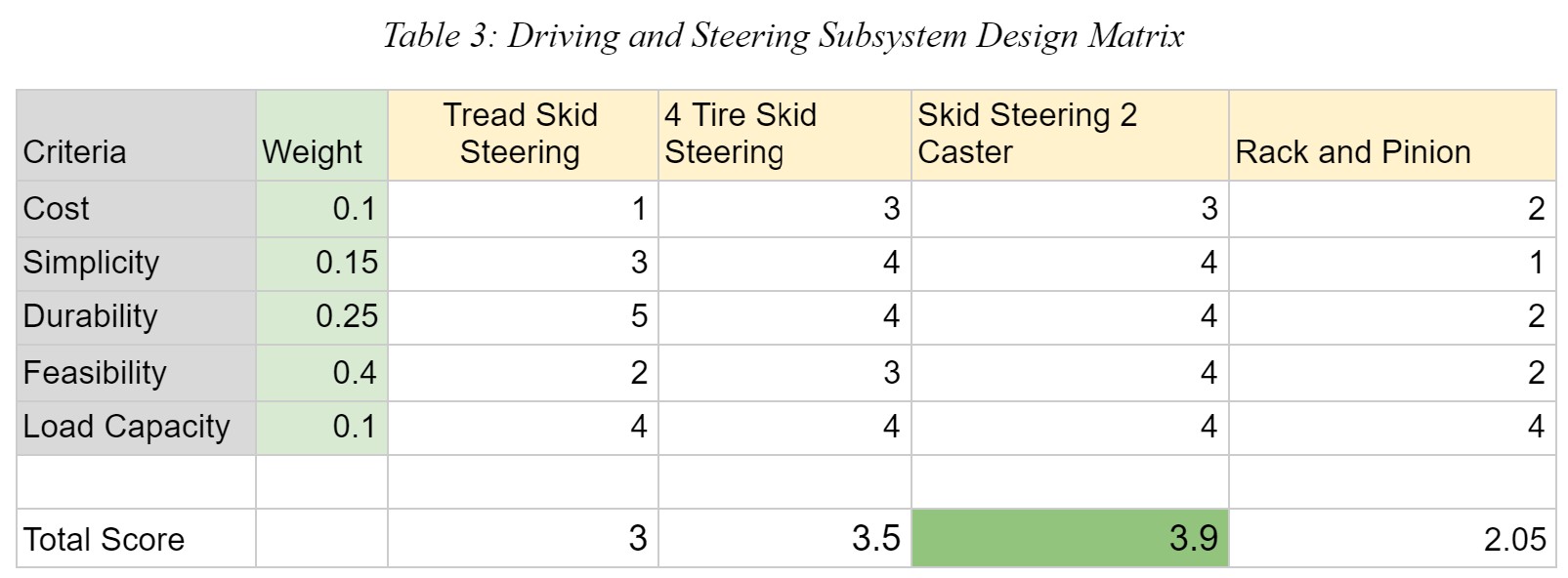
The first three subsystems were then evaluated using a design matrix, in order to narrow down to the most effective and feasible design.
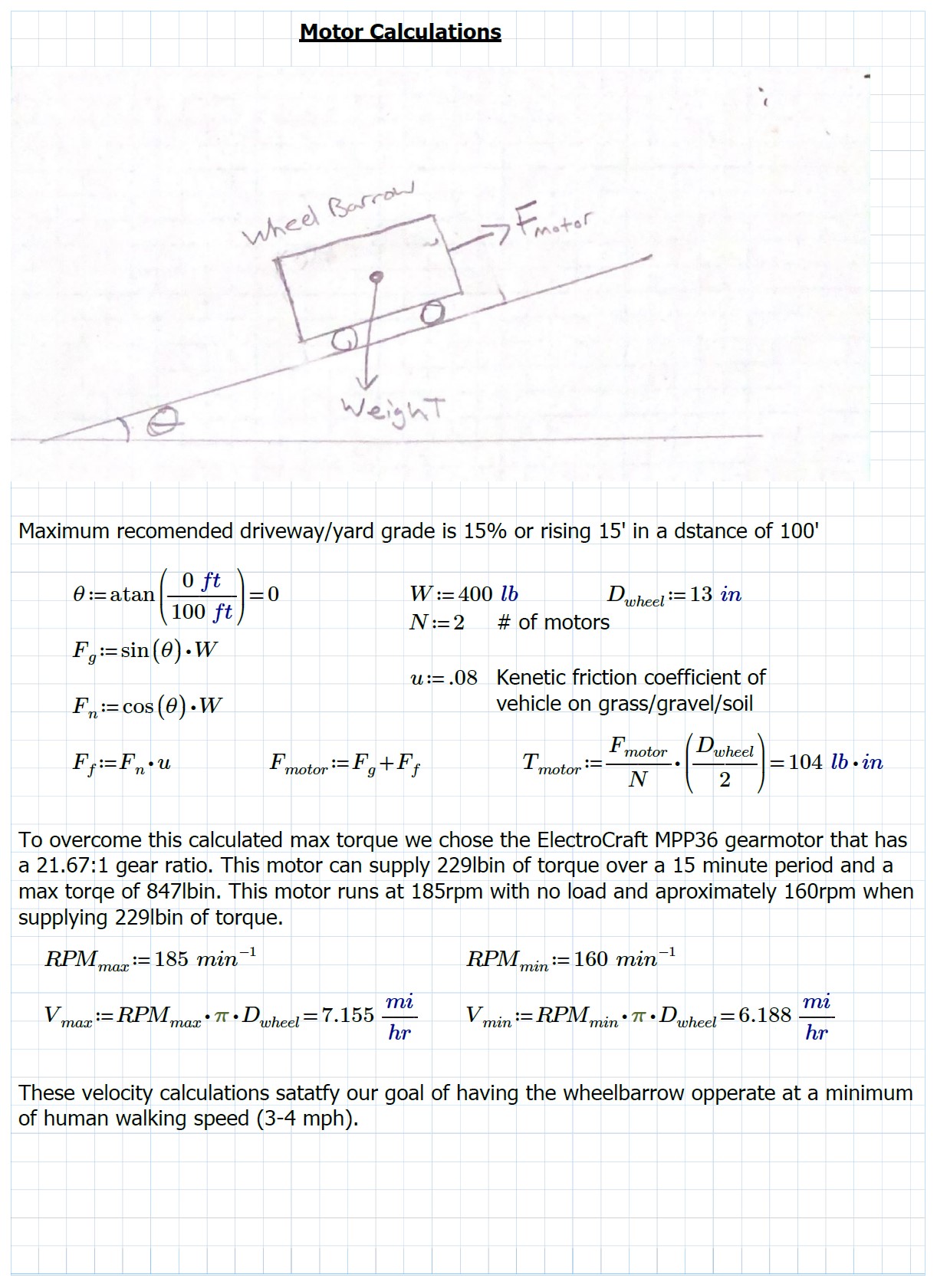
Considerations regarding the motor were determined by the calculations to the right for necessary torque against maximum standard to-code driveway inclines when loaded at the maximum of 400lbs.
Design Solution
The final solution was finalized after multiple iteration processes were completed and the design approach was progressed through. In the end, the wheelbarrow’s frame, which includes the chassis and bucket, was constructed out of 40/40 Extruded Aluminum. This material was evaluated and verified to contain physical and geometric properties that would handle all of the stress applied during extended use. This material was also versatile for applying connections and fasteners to other components such as the linear actuators. The bucket was designed to dump via a traditional dump-truck mechanism where top hinges allow the opening flap to pivot out when the bucket is angled. This design was paired with latches on the front of the door to allow for easy securement when the wheelbarrow is transporting material. The bucket itself was covered in 14 gage galvanized steel for rigidity and protection against any oxidation. Finally, skid steering with back caster wheels were selected to allow the wheelbarrow to turn 360 degrees without displacement. This allows the wheelbarrow to be nimbal, effective in tight spots, and accurate in dump location. The motors the team selected were ElectroCraft MPP36 gear motors with a 21.67:1 gear ratio. These proved by calculation and verification to provide plenty of torque for the client’s requirements.
The electrical system was designed around a 24-volt battery source. High current motor controllers were selected to control the motors as well as the linear actuators. An Arduino Uno microcontroller provides the brains for the system and interfaces with the RC controller. Electrical safety was a large component in the design. Circuit breakers are used to provide overcurrent protection. An emergency stop switch cuts power to all components and a built-in failsafe powers everything down in the case of RC signal loss. A battery disconnect switch allows for the electrical system to be powered down when not in use. Once the electrical components were selected, several schematics were created to outline the electrical power and control connections. Testing of components occurred continuously as parts arrived. After the wheelbarrow was built, the electrical power and control systems were integrated into the build. Below are pictures of the wheelbarrow in stages of completion to final assembly.

4040 Extruded Aluminum Being Cut

Axle Couplings
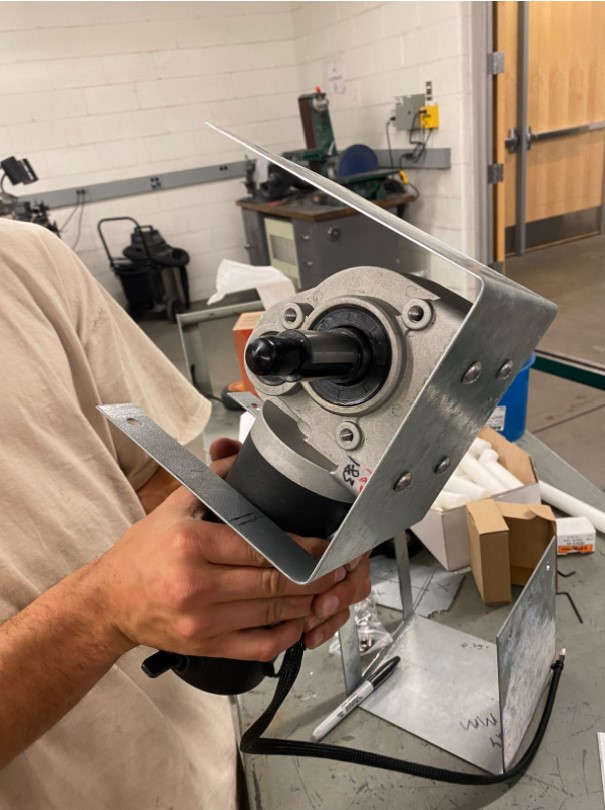
Motor attached to mount mount

Motor completely attached to chassis with coupling and bearing.
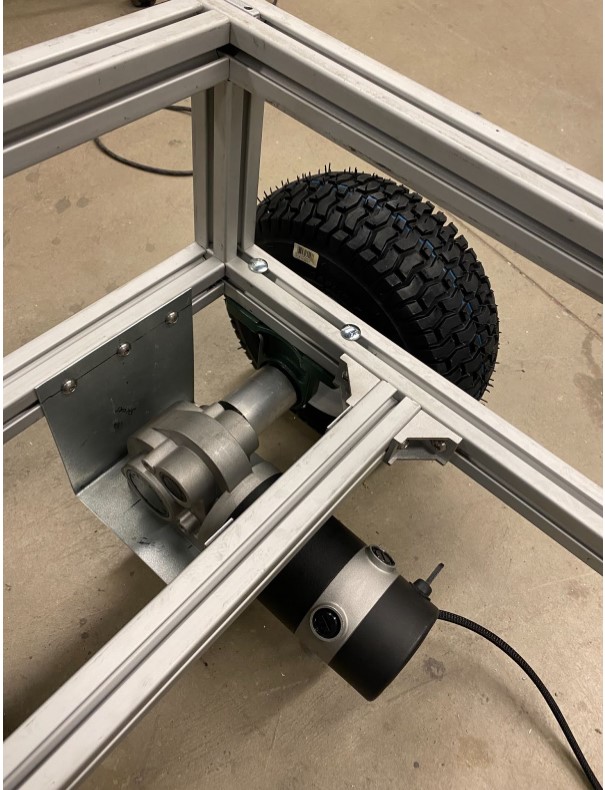
final mounting assembly of the motor to the drive wheel

complete chassis without the bucket or electrical components.

Final iteration of the wheelbarrow design minus any electric components.
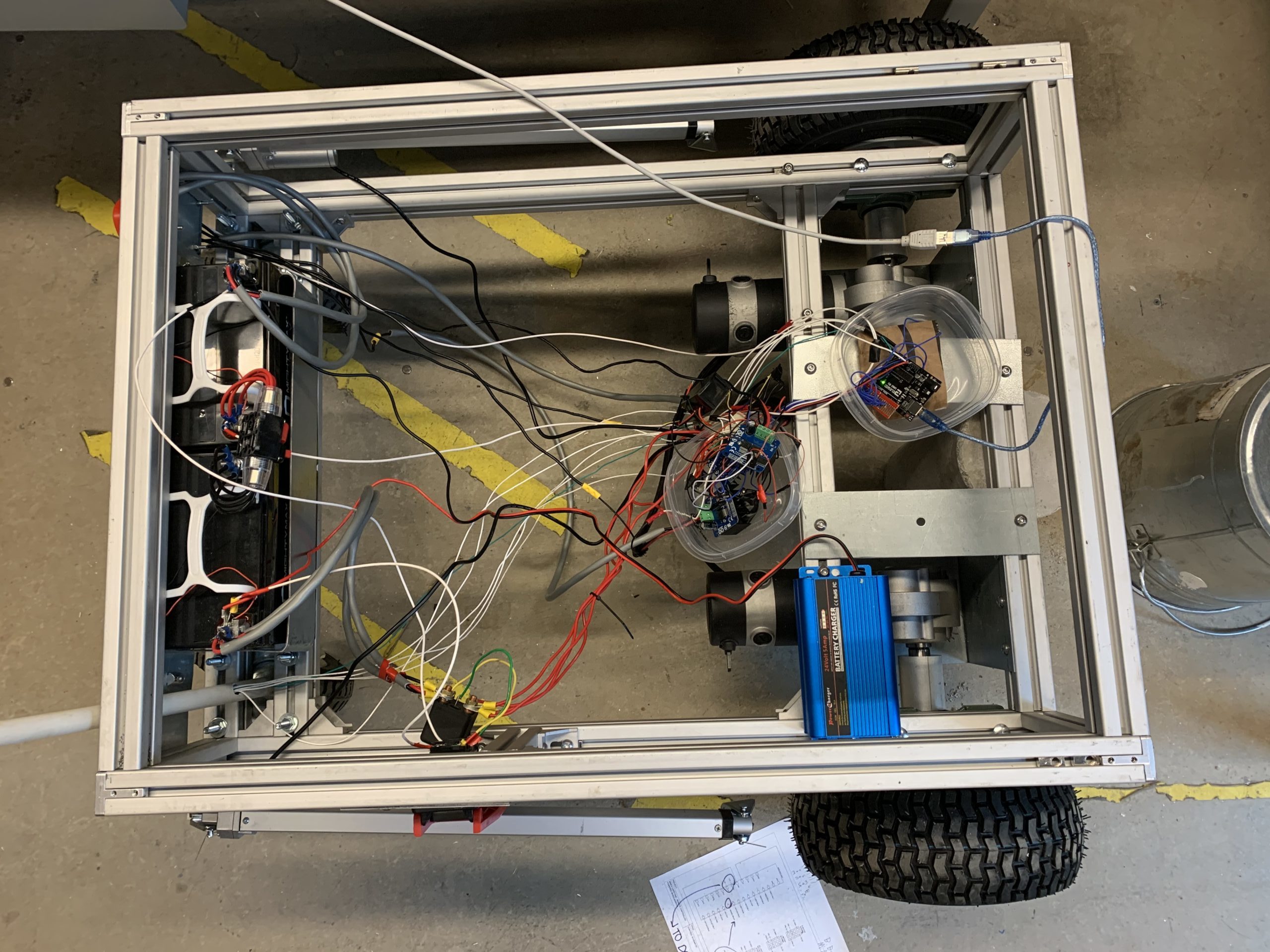
Electrical wiring

Full Assembly
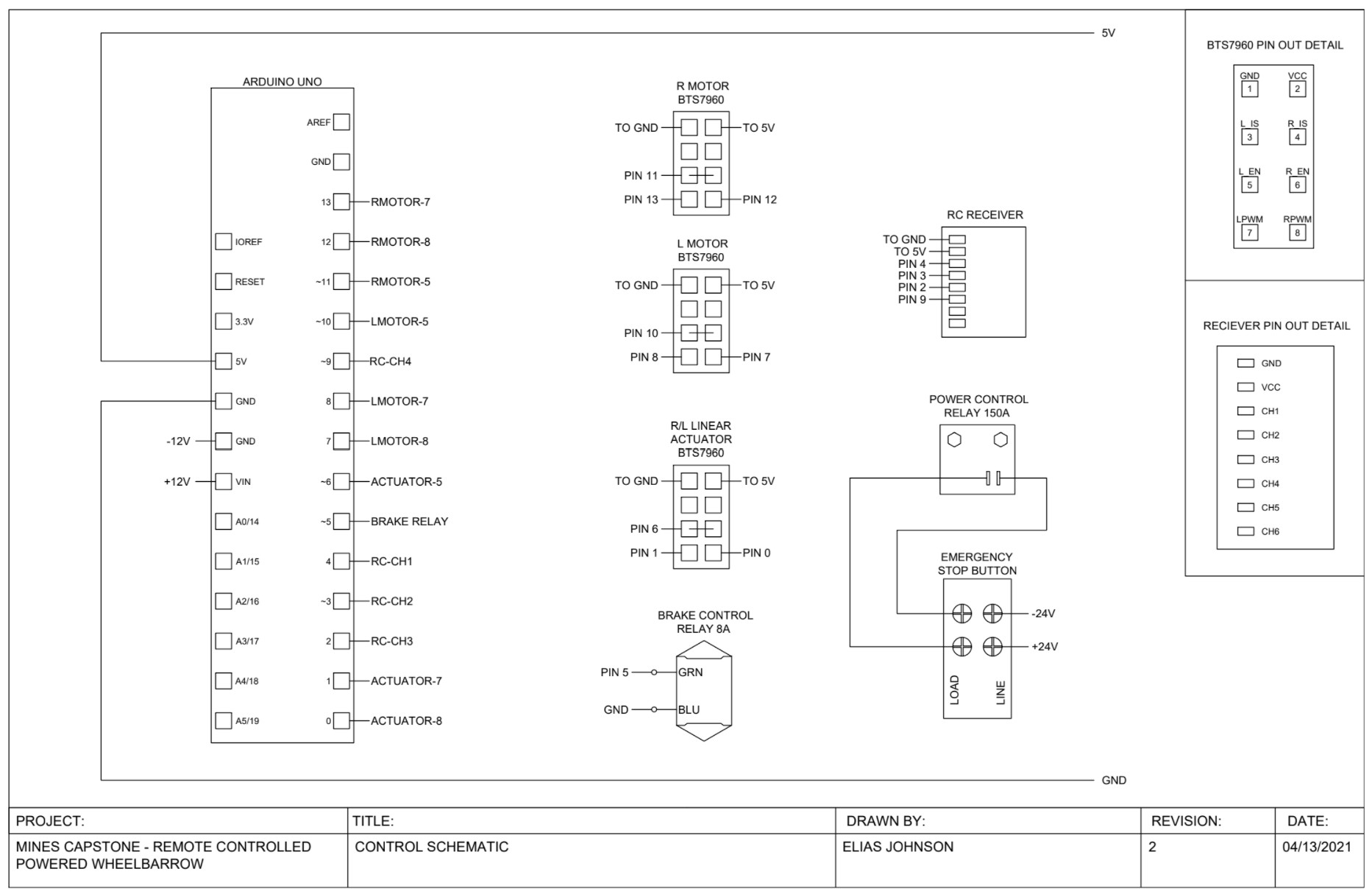
Control schematic
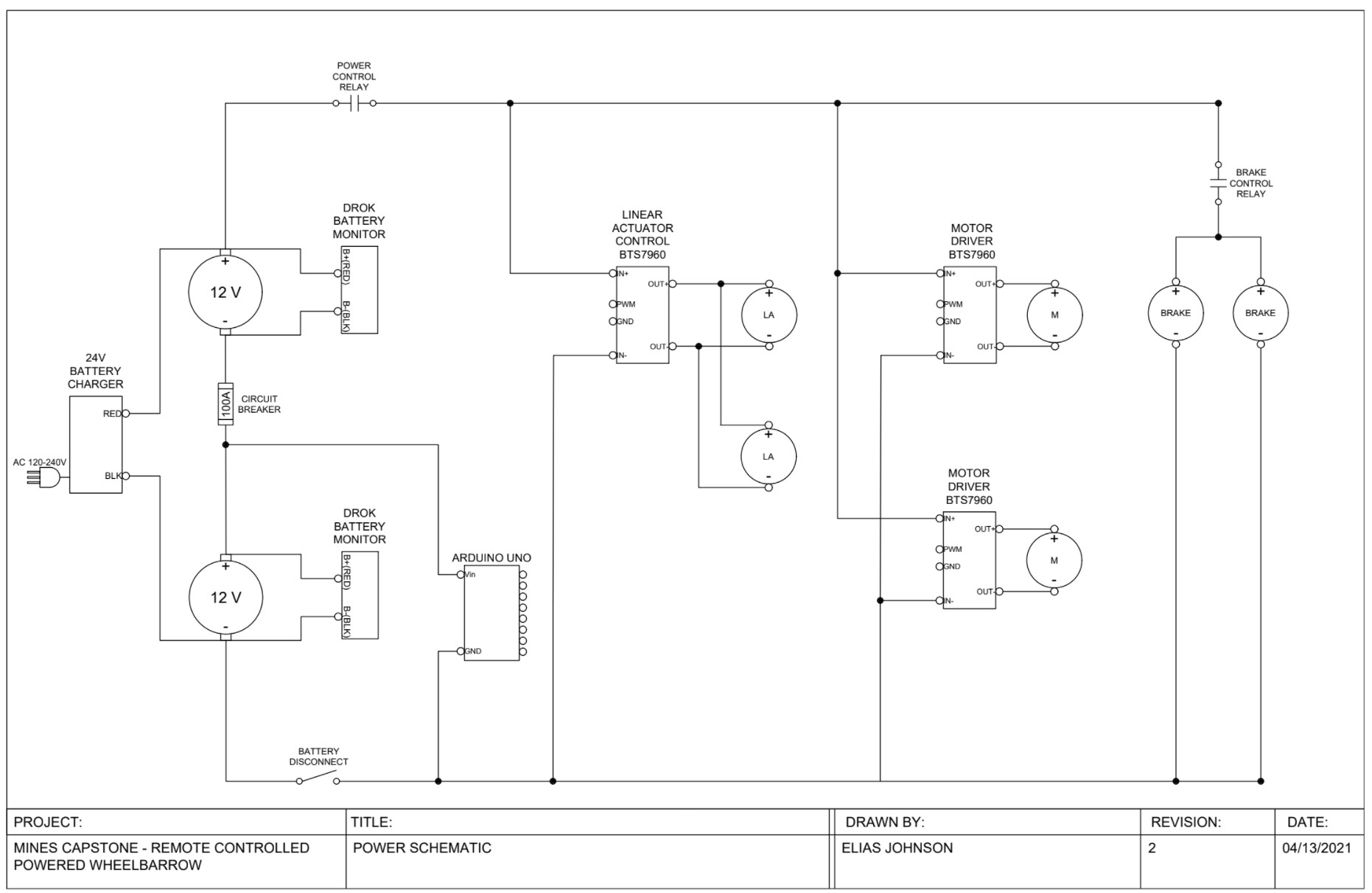
power schematic
Next Steps
Unfortunately, some electronics malfunctioned at the very end of the build. Moving forward with this project in the short term, new motor controllers should be purchased to replace the current ones. If another team were to take over this project, this would be a fairly simple fix in order to get the wheelbarrow back up and running. Looking at a longer timeframe, design of a mass-producible version could be considered. The project would improve if more time was spent analyzing the manufacturing process to see where improvements could be made in the mass production of a remote-controlled wheelbarrow. The manufacturing process of the bucket and chassis could be looked into as well as a dedicated electrical housing to weather-proof the system and organize the electronics.
Meet the Team
Jacob Farabaugh
 Jacob is a senior mechanical engineering student. When not doing school work he enjoys skiing, mountain biking, and climbing. Currently searching for a full time engineering career.
Jacob is a senior mechanical engineering student. When not doing school work he enjoys skiing, mountain biking, and climbing. Currently searching for a full time engineering career.
Sydney Harris
 Sydney is a Senior in Electrical Engineering with a specialization in Integrated Circuits and Electronics. After graduation she will be working as a Test Engineer for Gaming Laboratories.
Sydney is a Senior in Electrical Engineering with a specialization in Integrated Circuits and Electronics. After graduation she will be working as a Test Engineer for Gaming Laboratories.
Jacob Jessing
 Jacob is a Senior in Electrical Engineering with an emphasis in Antennas and Wireless Communications. A dedicated Radio Controlled vehicle hobbyist, he will be working as a RF engineer after graduation.
Jacob is a Senior in Electrical Engineering with an emphasis in Antennas and Wireless Communications. A dedicated Radio Controlled vehicle hobbyist, he will be working as a RF engineer after graduation.
Elias Johnson
 Eli was born and raised in Anchorage, Alaska before moving to Colorado to attend Mines and check out some new mountains. He loves skiing, biking, climbing, and just generally being outside. At Mines, he decided to pursue Electrical Engineering with an emphasis in the power/SCADA industry and will be going into electric power consulting after graduation.
Eli was born and raised in Anchorage, Alaska before moving to Colorado to attend Mines and check out some new mountains. He loves skiing, biking, climbing, and just generally being outside. At Mines, he decided to pursue Electrical Engineering with an emphasis in the power/SCADA industry and will be going into electric power consulting after graduation.
Joseph Lovelace
 I am a Senior Mechanical Engineering student from Centennial, CO. I love exploring Colorado by running, cycling, and skiing. I am graduating in May, but staying one more year for Grad School. Currently seeking part time employment.
I am a Senior Mechanical Engineering student from Centennial, CO. I love exploring Colorado by running, cycling, and skiing. I am graduating in May, but staying one more year for Grad School. Currently seeking part time employment.
Heather Schneider
 Heather is a senior in Mechanical Engineering graduating in May 2021, continuing education in Fall 2021 with a Master’s Non-Thesis in Robotics, while also continuing her internship at Lockheed Martin. She is from Aurora, Colorado and enjoys doing anything outside and hanging out with family & friends during her free time.
Heather is a senior in Mechanical Engineering graduating in May 2021, continuing education in Fall 2021 with a Master’s Non-Thesis in Robotics, while also continuing her internship at Lockheed Martin. She is from Aurora, Colorado and enjoys doing anything outside and hanging out with family & friends during her free time.
Isaiah Wier-March
 Senior Mechanical Engineering Student. Interested in design, fabrication, and testing. Please inquire with employment opportunities.
Senior Mechanical Engineering Student. Interested in design, fabrication, and testing. Please inquire with employment opportunities.