Subsurface Void Detection
Overview








Underground voids are costly, dangerous, and time consuming. Hidden voids can develop for decades and then suddenly open up due to human or natural disturbances. They can cause:
- Risk of injury and loss of life
- Formation of sink holes
- Emission of toxic gasses
- Disconnected gas lines
- Fires, and explosions
Subsurface voids can have devastating long-term economic impact on the communities, individuals, and projects they affect. For Newmont alone, underground voids result in an estimated yearly loss in excess of tens of millions of dollars in equipment and time.
The team considered several potential technologies both known and novel to the mining industry that could potentially mitigate the costs and dangers associated with subsurface voids in open pit mining, characterizing trade-offs and practical limits on depth, variations in soil/rock types, accuracy, time, and cost. The team also collaborated with the Colorado School of Mines Center for Wave Phenomena in what was a unique opportunity to test one of the only distributed acoustic sensing (DAS) systems in operation by a U.S. university.

Live Zoom Chat
Use the link below to join us live from 8:00 – 10:30 a.m. on December 3.
Join from PC, Mac, Linux, iOS or Android: https://mines.zoom.us/j/5330351043?pwd=U0h2bGRkTWRJQ2Npa0Y2Wm9VYnAwdz09
Password: 45634
Or iPhone one-tap: 12532158782,5330351043# or 13462487799,5330351043#
Or Telephone:
Dial: +1 253 215 8782 (US Toll) or +1 346 248 7799 (US Toll)
Meeting ID: 533 035 1043
Password: 45634
International numbers available: https://mines.zoom.us/u/almBjKhpn
Team Members
- Magnolia Cook
- Jimmy Gukeisen
- Dat Truong
- Ashley Grob
The Client
- John Lupo
Acknowledgements
Project Advisor: Prof. Robin Bullock
Technical Advisor: Dr. Hugh Miller
With Help from: Center for Wave Phenomena, Dr. Jeffrey Shragge, Jihyun Yang, Aleksie Titov
Video
Elevator Pitch
Mining for coal, metals, and other natural resources is an ancient human practice that has occurred around the world for millennia. As technology has improved, mining techniques have adapted. In the last 30-40 years, many historic mines have been converted from underground to open pit. Open-pit mining allows for more efficient resource extraction, but one of the challenges encountered has been the frequent and sudden collapse of portions of the mining floor due to subsurface voids. Subsurface voids in this context arise primarily from underground mines that were poorly back-filled or abandoned entirely. Shock waves from blast-hole drilling can further aggravate loose sediment, leading to void formation.This motivates the need for a subsurface void detection system.
Design Approach
We started with a set of criteria from the client and used this to guide our research.
| Client Needs |
| 40-foot detection depth |
| Detect voids with high confidence; proven for application in industry |
| Fast and non-intrusive to deploy |
| No interference with mine communication systems |
| Able to be used on an active mine site without stopping work |
| Easy to deploy for the untrained; extensive special training not a requirement |
| Distinguish between back fill and void; characterize severity of void |
We then sought to define meaningful categories for the various types of void detection systems. We found it useful to think of void detection systems in terms of three fundamental subsystems.
I. Sensors
Remote sensing devices commonly employ wave sensors due to the ability of waves to penetrate the majority of natural and man-made materials, as well as to scatter and reflect off of certain materials in predictably quantifiable ways.
i. Electromagnetic/Field Effect Sensors: Electrical Resistivity (ERT); Ground Penetrating Radar (GPR); Satellites; Drones; Robots
EM / field effect sensors are used to detect EM fields. Radios, radar, GPS, voltmeters, and compasses are all examples of EM devices. EM is prone to interference from other devices and EM is unreliable in certain environments (mountains, Bermuda Triangle, etc.), making them inappropriate for some applications. EM waves are also limited in their penetration depth by the skin effect.
ii. Vibration Sensors: Instrumented Drills; Microgravity; Drones; Robots
Vibration sensors detect the mechanical vibrations generated by seismic and acoustic waves. Vibration sensors are common geophysical and industrial sensors. Common examples of devices that use vibration sensors are seismometers, gyroscopes, strain gauges, and accelerometers. Because these waves cannot travel in a vacuum, coupling is particularly important in vibration sensors.
iii. Optical Sensors: Hybrid Fiber Optic Distributed Acoustic Sensing (DAS); Drones; Robots
Optical sensors sense light in the visible spectrum (380nm – 750nm). They have become popular due to their versatility, precision, resistance to interference, and low cost to manufacture. There are several properties of light that allow it to be creatively coupled to other types of waves, allowing many optical sensors to simultaneously operate as mechanical, kinetic, chemical, and field effect sensors. These sensors are the basis of hybrid fiber optic sensing.
II. Platforms
The device platform facilitates data collection and is the subsystem most likely to be affected by the boundaries and constraints particular to a given application. Environmental conditions like climate, terrain, soil composition, and overall access all come into consideration in the design of the device platform. A surface GPR platform, for example, is similar to a push lawn-mower and is intended to be operated over relatively even ground. Another common platform is cabling of some kind (e.x. fiber optic distributed sensing, ERT), which can be laid over the ground or dropped into a borehole. Specialized deployment equipment and housing exists to provide better borehole coupling for cable-based platforms. Other platforms that are intended to be more flexible are becoming increasingly popular, such as the Boston Dynamics autonomous land roving robot, spot.
III. Imaging Techniques
Imaging techniques are often necessary to decode the data and correlate it to the presence of a void. This can have a significant impact on the speed that results can be obtained. Remote wave sensing in particular tends to require sophisticated data processing.

Fiber Optic Sensor

seismometer

acoustic sensor
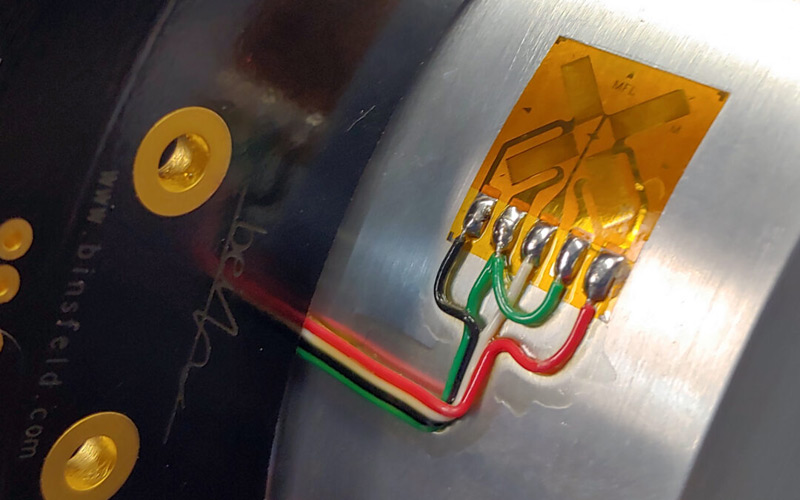
strain gauge

spot autonomous robot

drones

satellite
Instrumented Drill

borehole gpr

Surface GPR
seismic imaging

DAS Imaging

Microgravity Imaging

ERT Imaging
Design Solution
For the final design solution, we created a decision matrix of all subsurface void detection systems that we researched. We included probe drilling as a basis for the rest of the ratings.
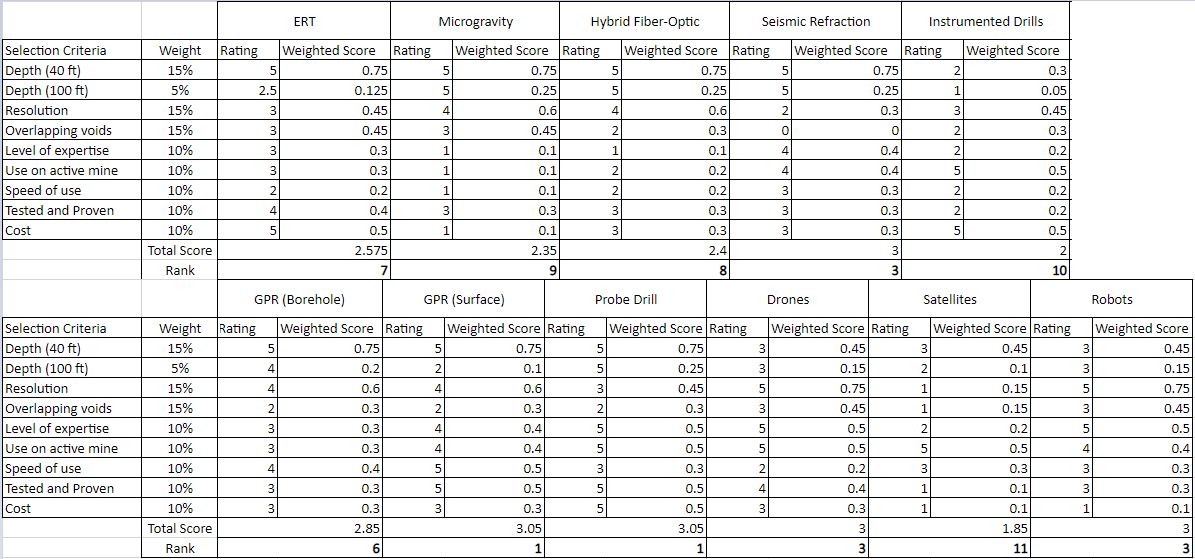
It’s fun to note that of all the methods we surveyed, the best, most accurate way to detect a hole in the ground is to dig for it and look. For all of its benefits though, probe drilling is stilled tied with GPR, which can provide more complete information about the depth and shape of the void and requires less intense labor.
Autonomous Drones and Robots
Autonomous drones and robots tied for second place after GPR. Recent improvements in these devices like extended battery life and payload capacity have popularized them as exploratory devices. Drones and robots can navigate difficult terrain and go where humans can’t, or where it would be inconvenient or impossible to trench cables or push a GPR device. Besides providing direct results in the form of videos and pictures, many autonomous robots also have a suite of add-ons that possess additional sensing and imaging capabilities. Spot from Boston Dynamics already has a LiDAR add-on. There are still some obstacles. Robots and drones can easily become stuck and irretrievable. They can also be damaged from exposure to fluids and gasses. Despite the present limitations, drones and robots are making rapid strides in terms of their technical capabilities and are presently the future of subsurface void detection.
 Testing the Terra Treble15 Fiber Optic DAS System
Testing the Terra Treble15 Fiber Optic DAS System
This semester, our team had the exciting opportunity to collaborate with the Colorado School of Mines Center for Wave Phenomena to test a hybrid fiber-optic DAS system at the Edgar Research Mine in Idaho Springs. Remote wave sensing systems are prone to unreliable measurements, long recording/processing times, and often require complicated imaging techniques to fully utilize. Data quality often depends on a successful coupling system, the demands on which are environment-specific. Despite the current shortcomings of remote sensing systems, improvements in precision sensor technology and integrated photonics is paving the way for devices with more sophisticated sensing capabilities. Although fiber-optic DAS came in 8th place in our decision matrix, we recognized it as a promising technology that has the potential to dramatically improve in the coming years.
We trenched nearly 300m of single-mode Kevlar strength fiber optic cable across two roads joined by a switchback above the mine entrance. We struck the ground near the cable with a sledgehammer every 5m and recorded the acoustic back scatter with the Terra Treble15 DAS, keeping a log of the location and time stamp of all strikes. We segmented the data into 50 second snapshots using python, which came out to approximately 4GB of image data. We did not perform image processing to verify the presence of the void, but hope that the data can be used in future projects.

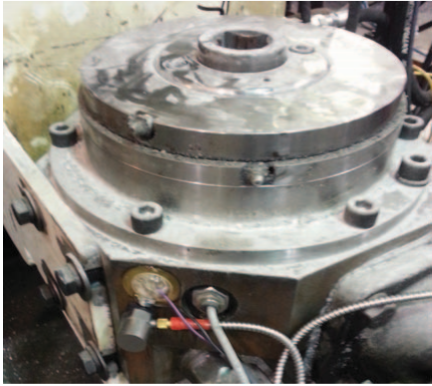
Terra Treble15 DAS

Edgar Experimental Mine

Edgar Mine Aerial View

Fiber Optic Cable Trenching
Trenched fiber optic cable

Data logging with the Terra Treble15 DAS
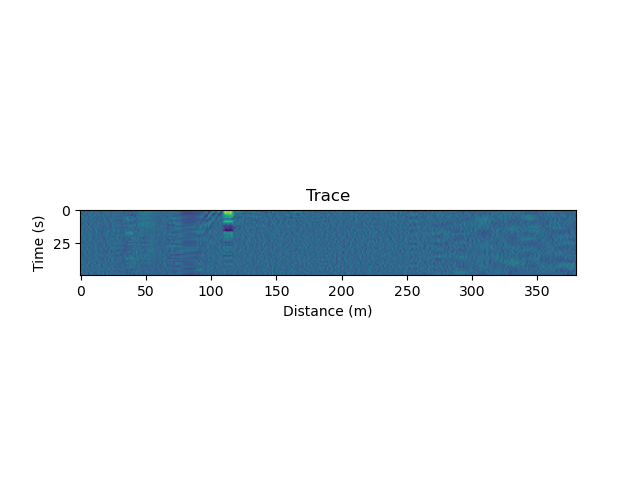
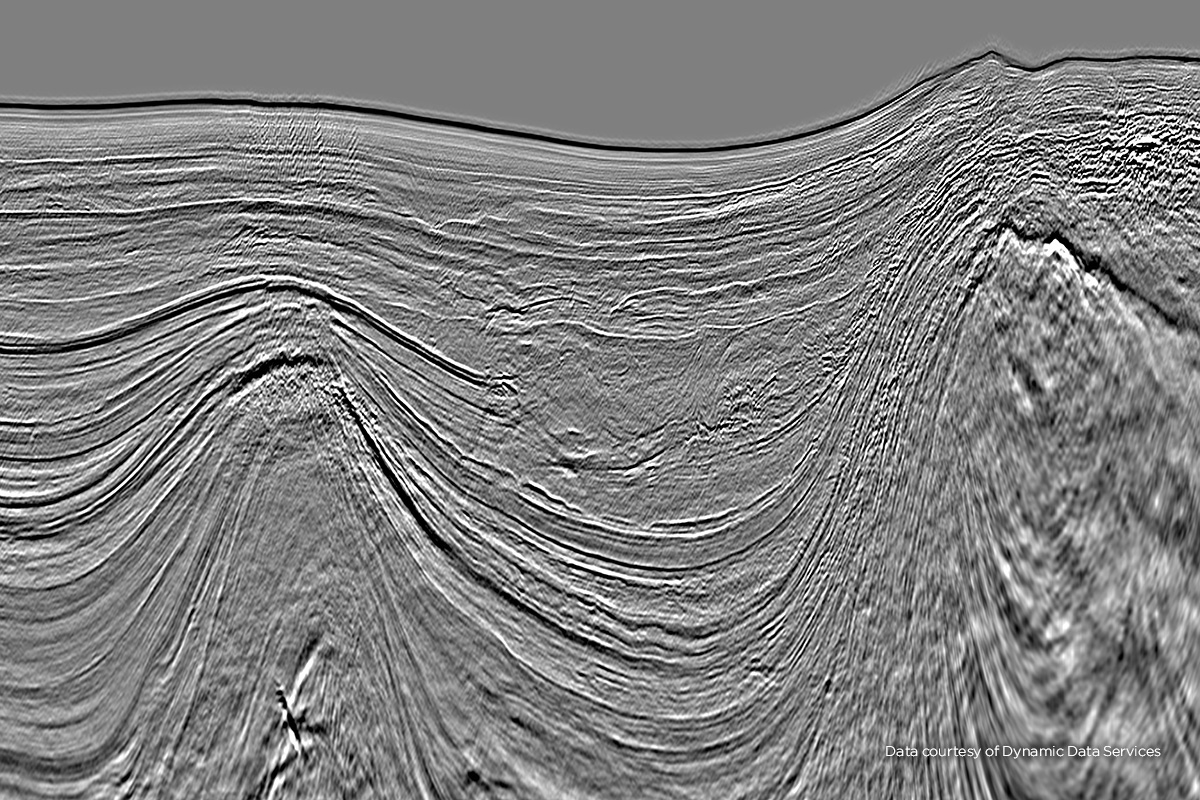
Acoustic Data
50 second snapshot of DAS data
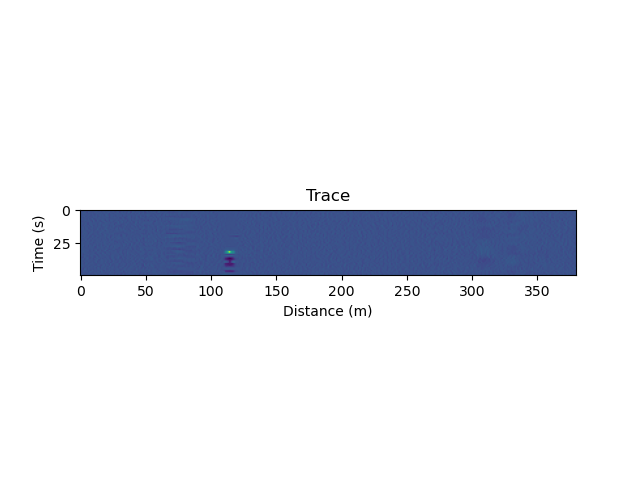
Acoustic Data
50 second snapshot of DAS data
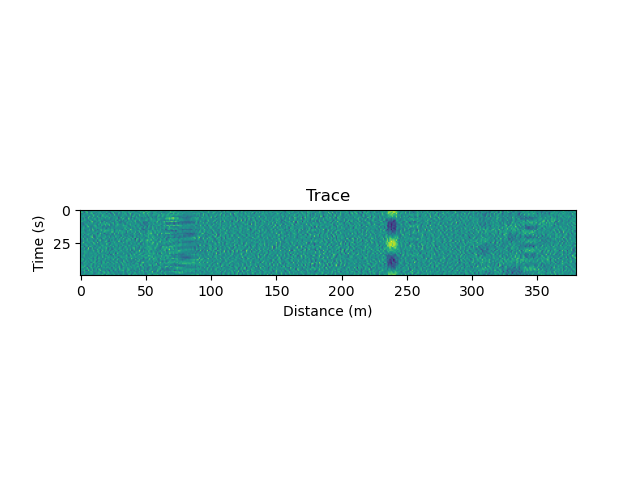
Acoustic Data
50 second snapshot of DAS data
Next Steps
Based on the work done over the past two semesters, we present three paths forward that we consider the most viable and worth pursuing.
1. DAS Software Development
We believe there is merit in a senior design project to develop DAS software with a user-friendly GUI that runs specialized DSP algorithms on the data in real-time, specifically for the application of subsurface void detection. An out-of-the-box solution like this would lower the education threshold necessary to use the software and increase speed of data collection. Furthermore, because remote sensing systems are most appropriate for long-term monitoring, the steady long-term influx of image data suggests that artificial intelligence (which has recently seen huge advancements in the computer vision field) could be particularly fruitful in helping to rapidly advance the accuracy of remote sensing systems.
2. Rapid DAS Deployment System
One of the biggest obstacles to our testing efforts at Edgar was how much time it took to trench and bury the cables. We investigated the possibility of using a ditch witch, but found it could be impractical in very rocky environments. We believe the development of a rapid deployment system for use in an open pit mine specifically could go a long way in reducing labor and set-up time and keeping the mine operational with minimal breaks in work.
3. Further Research into Drones and Robots as Sensing Platforms
Drones and robots are making rapid strides in terms of their technical capabilities and are presently the future of subsurface void detection. There are still obstacles to overcome in terms of battery life, payload, and water resistance, and we highly encourage a project geared toward solving one of these or a related problem.
Meet the Team
Magnolia Cook
 My name is Magnolia Cook and I study electrical engineering. I love art, music, language, and math. My favorite pastimes are skateboarding, standup comedy, and making. I am fascinated by data and sensors, and was extremely excited for the opportunity to work on a senior design project that had so much to do with both of these things.
My name is Magnolia Cook and I study electrical engineering. I love art, music, language, and math. My favorite pastimes are skateboarding, standup comedy, and making. I am fascinated by data and sensors, and was extremely excited for the opportunity to work on a senior design project that had so much to do with both of these things.
Jimmy Gukeisen
 I’m Jimmy Gukeisen and I am a mechanical engineering student. I am passionate about space technologies and space travel, but that doesn’t mean I didn’t love this opportunity to work on detecting voids under the Earth. When I’m not tied up in school, I love disc golf and Dungeons and Dragons!
I’m Jimmy Gukeisen and I am a mechanical engineering student. I am passionate about space technologies and space travel, but that doesn’t mean I didn’t love this opportunity to work on detecting voids under the Earth. When I’m not tied up in school, I love disc golf and Dungeons and Dragons!
Ashley Grob
 Hi, my name is Ashley Grob and I am a senior studying civil engineering. I will be graduating in May of 2021 and after graduation I will be working as a field engineer for Atkinson Underground Construction in San Diego. I was interested in this project because I have heard of the challenges with subsurface voids during tunnel construction. I think that finding a technology to accurately detect subsurface voids is very important and it was exciting to be a part of a team that was testing and researching opportunities for this. Outside of school, I enjoy painting, watching Netflix, and spending time with my family, friends, and dog.
Hi, my name is Ashley Grob and I am a senior studying civil engineering. I will be graduating in May of 2021 and after graduation I will be working as a field engineer for Atkinson Underground Construction in San Diego. I was interested in this project because I have heard of the challenges with subsurface voids during tunnel construction. I think that finding a technology to accurately detect subsurface voids is very important and it was exciting to be a part of a team that was testing and researching opportunities for this. Outside of school, I enjoy painting, watching Netflix, and spending time with my family, friends, and dog.
Dat Truong
 I’m Dat Truong. I’m an EE and love the outdoors. I also love studying about old fighter jets or watching nature documentaries. When I am studying my field of EE, I look up antenna designs and functions.
I’m Dat Truong. I’m an EE and love the outdoors. I also love studying about old fighter jets or watching nature documentaries. When I am studying my field of EE, I look up antenna designs and functions.